Günther Hager
User
Meine Einbauten, Änderungen und Ergänzungen beim Elektrorumpf zur Seglerversion meiner FS-4000
Beschreibung der Seglerversion hier: http://www.aero-hg.de/FS4000.html
Die hauptsächlichen Änderungen befinden sich im Rumpfbereich, was man auch gut im Schaltbild erkennen kann. Siehe SB2
 SB 2
SB 2
Für den Antrieb des E - Modells, habe ich mich für einen Direktantrieb mit einem Außenläufer entschlossen, da dieser mit einem ausreichenden Drehmoment und langsam laufend in einer großen Auswahl erhältlich ist. Auch fällt bei einem Direktantrieb ein lästiger Ausbau für die von Zeit zu Zeit anfallenden Getriebeschmierungen weg. Außerdem entfällt somit der Verschleiß des Getriebes und dessen zusätzliches Geräusch, was nervend sein kann.
So habe ich mich für einen der 400er-Serie, über 800W-Hackermotor entschlossen. Dieser hat allerdings einen Durchmesser von 40mm, sodass ich den Rumpf um 57mm gekürzt habe, um diesen einbauen zu können. So konnte ein 50er Spinner passend in der Farbe des Rumpfes verwendet werden. Auch konnte ich wie in der Seglerversion den Rumpf ebenfalls hinten sogar um 45mm kürzen und die Antriebs- und Steuer- Komponenten gut im vorderen Rumpfbereich für den passenden Schwerpunkt platzieren. Ein 60 A Motorsteller mit 4S 3200 C30 KOKAM-Lipozellen sorgen mit einer LS 14 x 9,5 für einen guten Steigflug.
Zur exakten Abtrennung habe ich nach der Messung ein ISO-Band angebracht. Daneben der präparierte Spinner als Turbospinner umgebaut.
 Umbau eines normalen Spinners in einen Turbospinner hier: http://www.aero-hg.de/Spinner.html
Umbau eines normalen Spinners in einen Turbospinner hier: http://www.aero-hg.de/Spinner.html
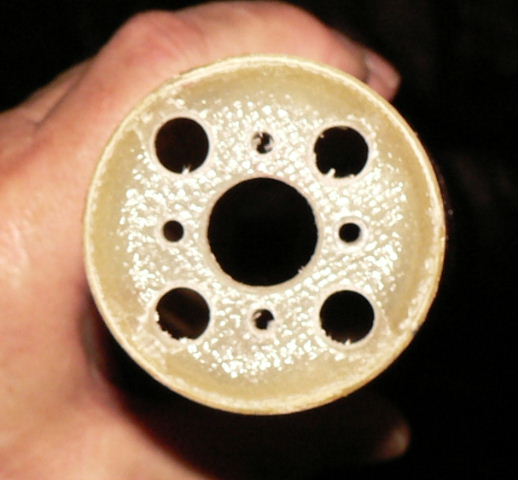 Hier der Motorspant, den ich aus 2 aufeinander geklebten 1,5mm Leiterplatten hergestellt habe und mit 200g/m² Glasgewebe an der
Hier der Motorspant, den ich aus 2 aufeinander geklebten 1,5mm Leiterplatten hergestellt habe und mit 200g/m² Glasgewebe an der
Rumpfwand (vorne u. hinten) verstärkt eingeharzt habe. Selbstverständlich wie üblich wurde die Rumpfwand vor dem Einkleben angeschliffen.
Die 3mm Befestigungslöcher, wie die 8mm Kühlungslöcher sind gut erkennbar.
 Vor der Einpassung.
Vor der Einpassung.
Um eine unnötige Tiefenzumischung beim Motorlauf zu vermeiden, habe ich einen Motorsturz von etwas über 1° eingebaut, mehr ging leider durch die Enge des Rumpfes und der Größe des Motors mit den Anschlussleitungen nicht. Es stellte sich anschließend in der Praxis aus, dass der Sturz auch völlig ausreichend ist. Mit dem, an dem Spinner ist der geringe Sturz optisch kaum bemerkbar.
 Zur Erleichterung beim Motoreinbau, vor allem bei der Anpassung, habe ich eine M3 Gewindestange verwendet, die ich durch ein Befestigungsloch gesteckt und am Motor angeschraubt habe. Damit lässt sich der Motor platziert und leicht zum Motorspant ziehen, führen und die Schrauben gut einschrauben.
Zur Erleichterung beim Motoreinbau, vor allem bei der Anpassung, habe ich eine M3 Gewindestange verwendet, die ich durch ein Befestigungsloch gesteckt und am Motor angeschraubt habe. Damit lässt sich der Motor platziert und leicht zum Motorspant ziehen, führen und die Schrauben gut einschrauben.

 Und hier in beiden Bildern ist die Anordnung dargestellt, wie sie in den Rumpf eingeschoben wird und zu jeder Zeit die kompakte Antriebseinheit wieder ausbaubar ist.
Und hier in beiden Bildern ist die Anordnung dargestellt, wie sie in den Rumpf eingeschoben wird und zu jeder Zeit die kompakte Antriebseinheit wieder ausbaubar ist.
 Hier die eingebaute Antriebseinheit mit der Einheit der V-Leitwerkservos und dem Empfänger.
Hier die eingebaute Antriebseinheit mit der Einheit der V-Leitwerkservos und dem Empfänger.
Beide Brettchen aus 5 x 35 Kiefer (GFK verstärkt im Arretierungsbereich) sind zusammen mit einer M 4 Schraube am Rumpfboden arretiert.
:::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::
Und hier 2 Bilder nach den ersten drei Flügen


Um nicht alles nochmals neu zu programmieren, habe ich fast alle Einstellungen ohne Änderungen von der Seglerversion übernommen. Lediglich den Schalter für die Schleppkupplung habe ich für die Motoreinschaltung verwendet, musste allerdings die Flugphasen und die Landeeinstellungen neu programmieren oder ändern. So reichten 3 Starts aus, um bis auf die Feineinstellungen das Modell in allen Flugphasen ganz gut fliegen und landen konnte. Einige Feineinstellungen werden mit der Zeit noch eingestellt.
Die über den Daumen, für einen Segler gerechnete Leistung mit 90 ... 100 W/Kg die Regel ist, liege ich mit meinen gemessenen 35,2 A und etwa 14 V bei knapp 500 W, was bei 4,5 Kg mehr als ausreichend ist.
Die Messungen habe ich nach 1,5 Minuten Laufzeit der vollen LIPOS 4S 3200, 30C gemacht, wo der Strom = 35,2 A betrug und die Drehzahl = 6280 U/min.
So zeigten es auch die Flüge mit dem Graupner CAM FOLDING PROP 14 x 9,5, dass die 4,5 KG zügig mit den 4 LIPO´s flott nach oben gingen. Auch der Start mit laufendem Motor ist völlig problemlos, das Modell zieht gut aus der Hand und erfordert kaum ein Nachschieben.
Dieses müssten theoretisch etwa eine Motorlaufzeit von 7 bis Minuten ergeben. Da die Spannung sich weiter bis zur Abschaltzeit verringert, wird eine genauere Laufzeit noch über die Uhr ermittelt.
Der Test ergab eine Motorlaufzeit von etwa 5 Minuten, wobei ich die Reduzierung der Zeit, auf die geringere Kapazität der LIPO´s und aller anderen Komponenten bei einer hohen Strombelastung zu schreibe.
Die Drehzahl nahm bei etwa 4 Minuten bemerkbar ab, sodass ich die Stoppuhr auf 3`30`` mit einer Minute Zeitansage eingestellt habe. Also auf 4,5 Minuten, um noch sicher bei einem Absaufer aus einem Tal hoch kommen kann und die Zellen nicht bis zur Abschaltung bei 3 V/Z gequält werden.
Ich kann mich nur wiederholen und sagen, die Flüge mit dem FS-4000, ob Segler- oder E-Seglerversion, ist immer wieder ein Erlebnis und das Modell hat zudem, eine mehrfache Lebensdauer eines herkömmlichen Hi Tech Modells, nicht nur im rauen Hangflugbetrieb.
im November 2008, Günther Hg.
Beschreibung der Seglerversion hier: http://www.aero-hg.de/FS4000.html
Die hauptsächlichen Änderungen befinden sich im Rumpfbereich, was man auch gut im Schaltbild erkennen kann. Siehe SB2
Für den Antrieb des E - Modells, habe ich mich für einen Direktantrieb mit einem Außenläufer entschlossen, da dieser mit einem ausreichenden Drehmoment und langsam laufend in einer großen Auswahl erhältlich ist. Auch fällt bei einem Direktantrieb ein lästiger Ausbau für die von Zeit zu Zeit anfallenden Getriebeschmierungen weg. Außerdem entfällt somit der Verschleiß des Getriebes und dessen zusätzliches Geräusch, was nervend sein kann.
So habe ich mich für einen der 400er-Serie, über 800W-Hackermotor entschlossen. Dieser hat allerdings einen Durchmesser von 40mm, sodass ich den Rumpf um 57mm gekürzt habe, um diesen einbauen zu können. So konnte ein 50er Spinner passend in der Farbe des Rumpfes verwendet werden. Auch konnte ich wie in der Seglerversion den Rumpf ebenfalls hinten sogar um 45mm kürzen und die Antriebs- und Steuer- Komponenten gut im vorderen Rumpfbereich für den passenden Schwerpunkt platzieren. Ein 60 A Motorsteller mit 4S 3200 C30 KOKAM-Lipozellen sorgen mit einer LS 14 x 9,5 für einen guten Steigflug.
Zur exakten Abtrennung habe ich nach der Messung ein ISO-Band angebracht. Daneben der präparierte Spinner als Turbospinner umgebaut.
Rumpfwand (vorne u. hinten) verstärkt eingeharzt habe. Selbstverständlich wie üblich wurde die Rumpfwand vor dem Einkleben angeschliffen.
Die 3mm Befestigungslöcher, wie die 8mm Kühlungslöcher sind gut erkennbar.
Um eine unnötige Tiefenzumischung beim Motorlauf zu vermeiden, habe ich einen Motorsturz von etwas über 1° eingebaut, mehr ging leider durch die Enge des Rumpfes und der Größe des Motors mit den Anschlussleitungen nicht. Es stellte sich anschließend in der Praxis aus, dass der Sturz auch völlig ausreichend ist. Mit dem, an dem Spinner ist der geringe Sturz optisch kaum bemerkbar.
Beide Brettchen aus 5 x 35 Kiefer (GFK verstärkt im Arretierungsbereich) sind zusammen mit einer M 4 Schraube am Rumpfboden arretiert.
:::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::::
Und hier 2 Bilder nach den ersten drei Flügen
Um nicht alles nochmals neu zu programmieren, habe ich fast alle Einstellungen ohne Änderungen von der Seglerversion übernommen. Lediglich den Schalter für die Schleppkupplung habe ich für die Motoreinschaltung verwendet, musste allerdings die Flugphasen und die Landeeinstellungen neu programmieren oder ändern. So reichten 3 Starts aus, um bis auf die Feineinstellungen das Modell in allen Flugphasen ganz gut fliegen und landen konnte. Einige Feineinstellungen werden mit der Zeit noch eingestellt.
Die über den Daumen, für einen Segler gerechnete Leistung mit 90 ... 100 W/Kg die Regel ist, liege ich mit meinen gemessenen 35,2 A und etwa 14 V bei knapp 500 W, was bei 4,5 Kg mehr als ausreichend ist.
Die Messungen habe ich nach 1,5 Minuten Laufzeit der vollen LIPOS 4S 3200, 30C gemacht, wo der Strom = 35,2 A betrug und die Drehzahl = 6280 U/min.
So zeigten es auch die Flüge mit dem Graupner CAM FOLDING PROP 14 x 9,5, dass die 4,5 KG zügig mit den 4 LIPO´s flott nach oben gingen. Auch der Start mit laufendem Motor ist völlig problemlos, das Modell zieht gut aus der Hand und erfordert kaum ein Nachschieben.
Dieses müssten theoretisch etwa eine Motorlaufzeit von 7 bis Minuten ergeben. Da die Spannung sich weiter bis zur Abschaltzeit verringert, wird eine genauere Laufzeit noch über die Uhr ermittelt.
Der Test ergab eine Motorlaufzeit von etwa 5 Minuten, wobei ich die Reduzierung der Zeit, auf die geringere Kapazität der LIPO´s und aller anderen Komponenten bei einer hohen Strombelastung zu schreibe.
Die Drehzahl nahm bei etwa 4 Minuten bemerkbar ab, sodass ich die Stoppuhr auf 3`30`` mit einer Minute Zeitansage eingestellt habe. Also auf 4,5 Minuten, um noch sicher bei einem Absaufer aus einem Tal hoch kommen kann und die Zellen nicht bis zur Abschaltung bei 3 V/Z gequält werden.
Ich kann mich nur wiederholen und sagen, die Flüge mit dem FS-4000, ob Segler- oder E-Seglerversion, ist immer wieder ein Erlebnis und das Modell hat zudem, eine mehrfache Lebensdauer eines herkömmlichen Hi Tech Modells, nicht nur im rauen Hangflugbetrieb.
im November 2008, Günther Hg.
Zuletzt bearbeitet: