Hallo,
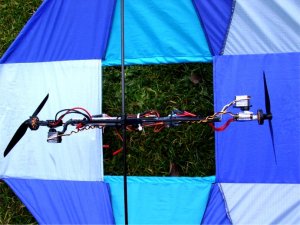
Im Rahmen meiner Experimente mit 3D-Vektorsteuerungsmoduln habe ich eine doppelte 3D-Vektorsteuerung (Zugvektor- und Schubvektorsteuerung in einem) in Form einer (für meine Versuchsträger) steckbaren Motorgondel entwickelt.
Sie besteht aus 2 modifizierten Power-Schnurzz BLs, 4 HITEC HS65-Servos mit Metallgetriebe, 2 10A SIMPROP-Reglern, einem REX 5 mpd - Empfänger sowie 3 V-Kabel für die Empfängeranschlüsse und einem V-Kabel für den Akkuanschluss (3S-1400mA-LiPo).
Als Versuchsträger dient ein ruderloser Trapezdrache mit 180cm Spannweite und ca. 0,9qm Flächeninhalt. Der Gesamtschub beträgt (bei vollem 3S - 1400mA 15C - Akku) ca. 800 - 1000g, die Rudermaschinenwege laufen über einen Bereich von ca. 140 Grad (125% Servoweg in alle Richtungen).
Die Entfernung zwischen den Propellerachsen beträgt ca. 50cm, die Gondel wiegt ca. 170g (mit Akku: 270g), der flugfertige Versuchsträger ca. 500g.
Die 'Hebelwege' von den Propellerachses zur Schwerpunktebene betragen vorne ca. 35cm, hinten ca. 40cm.
Die Flugerprobung zeigte, dass das Erprobungsobjekt zum Spielball dieser Hebelkräfte insbesondere bei Langsamflug wird und flache 360Grad-Drehungen im Geradeausflug mit engstem Radius möglich sind.
Mit ein wenig Phantasie kann man sich ausmahlen, was diese Konstruktion mit einem stabilen (z. B. Doppelrumpf-) Flächenflugzeug mit zusätzlichen Steuerudern anstellen würde...
Mehr Bilder, eine Beschreibung der Entwicklung und 2 Videos (eins zeigt die Steuerfunktionen, das zweite den ersten Erprobungsflug ) könnt Ihr auf meiner Seite
www.crazyplanes.de
in der Seitenrubrik 'SPECIALS - 3D - FOLD-UP-KITES anschauen.
Gruß
flattermann
Im Rahmen meiner Experimente mit 3D-Vektorsteuerungsmoduln habe ich eine doppelte 3D-Vektorsteuerung (Zugvektor- und Schubvektorsteuerung in einem) in Form einer (für meine Versuchsträger) steckbaren Motorgondel entwickelt.
Sie besteht aus 2 modifizierten Power-Schnurzz BLs, 4 HITEC HS65-Servos mit Metallgetriebe, 2 10A SIMPROP-Reglern, einem REX 5 mpd - Empfänger sowie 3 V-Kabel für die Empfängeranschlüsse und einem V-Kabel für den Akkuanschluss (3S-1400mA-LiPo).
Als Versuchsträger dient ein ruderloser Trapezdrache mit 180cm Spannweite und ca. 0,9qm Flächeninhalt. Der Gesamtschub beträgt (bei vollem 3S - 1400mA 15C - Akku) ca. 800 - 1000g, die Rudermaschinenwege laufen über einen Bereich von ca. 140 Grad (125% Servoweg in alle Richtungen).
Die Entfernung zwischen den Propellerachsen beträgt ca. 50cm, die Gondel wiegt ca. 170g (mit Akku: 270g), der flugfertige Versuchsträger ca. 500g.
Die 'Hebelwege' von den Propellerachses zur Schwerpunktebene betragen vorne ca. 35cm, hinten ca. 40cm.
Die Flugerprobung zeigte, dass das Erprobungsobjekt zum Spielball dieser Hebelkräfte insbesondere bei Langsamflug wird und flache 360Grad-Drehungen im Geradeausflug mit engstem Radius möglich sind.
Mit ein wenig Phantasie kann man sich ausmahlen, was diese Konstruktion mit einem stabilen (z. B. Doppelrumpf-) Flächenflugzeug mit zusätzlichen Steuerudern anstellen würde...
Mehr Bilder, eine Beschreibung der Entwicklung und 2 Videos (eins zeigt die Steuerfunktionen, das zweite den ersten Erprobungsflug ) könnt Ihr auf meiner Seite
www.crazyplanes.de
in der Seitenrubrik 'SPECIALS - 3D - FOLD-UP-KITES anschauen.
Gruß
flattermann