Hi
da mich das Thema auch sehr Interessiert stelle ich mal eine Info rein.
Ich habe heute eine mail bekommen
LogView´s neue Version soll das GPS wohl nun auch erkennen.
Hier der Auszug meiner Mail
______________________________________________________________________
** english version below **
Hallo LogView Freunde,
es gibt ein Update für LogView. Die aktuelle Version ist nun 2.7.1.411.
Themen in dieser News:
1) LogView 2.7.1.411 Online
2) Hyperion Lader mit Firmware 4 / 5 funktionieren
3) Schulze NextGen II Lader funktionieren
4) Conrad Charge Manager 2020 Tester gesucht
5) SM Modellbau GPS Logger - Info
1) LogView 2.7.1.411 Online
----------------------------------------------
Neuerungen in dieser Version:
+ alle Firmware Versionen von 1-5 bei den Hyperions integriert !!
> Ladung in % bei FW 5
> Innenwiderstand bei FW 5
+ alle Schulze Next Gen II eingebunden
+ Ultra DUO Plus 60 eingebunden
+ WTDL1 Fix
> Timeout hinzugefügt (verhindert geblockte Toolbox)
+ Grafikaktualisierungszeit über ComboBox einstellbar
> von 1ms bis eine Stunde
+ Gauges ausgetauscht
+ Junsi PowerLog -> Vorzeichenfix
+ kleine Korrektur an der UniLog Toolbox
Ein Update ist auf jeden Fall empfohlen!
Den Download findet ihr hier:
http://www.logview.info/vBulletin/downloads.php
Anmerkungen zu der Version könnt ihr uns hier hinterlassen:
http://www.logview.info/vBulletin/showthread.php?1978-LogView-2.7.1.411-Online
Wie immer würden wir uns natürlich freuen, wenn ihr uns den obligatorischen "Download Euro" zukommen lasst. Auch dafür haben wir direkt einen Link für euch:
https://www.paypal.com/cgi-bin/webs...ode=EUR&lc=DE&bn=PP-DonationsBF&charset=UTF-8
2) Hyperion Lader mit Firmware 4 / 5 funktionieren
----------------------------------------------
Die Hyperion Lader funktionieren nun alle wieder. Die Firmware spielt keine Rolle.
Was (noch) nicht geht ist das Auslesen und Einstellen der Lader.
Wir wissen auch noch nicht ob Hyperion die Infos dazu raus gibt.
3) Schulze NextGen II Lader funktionieren
----------------------------------------------
Alle Schulze NextGen II Lader funktionieren nun mit LogView.
Als Geräte Schulze NextGen II auswählen.
4) Conrad Charge Manager 2020 Tester gesucht
----------------------------------------------
Wir versuchen gerade den CM2020 einzubinden. Wer so ein Gerät hat und bei der Einbindung / beim Testen helfen möchte, der kann sich bei uns melden:
dominik@logview.info .
Die ersten Ergebnisse sind recht vielversprechend :-)
5) SM Modellbau GPS Logger - Info
----------------------------------------------
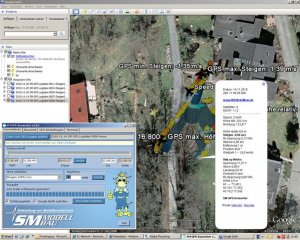
Der GPS Logger von SM Modellbau funktioniert auch jetzt schon in LogView. Dazu muss man aber die Logfiles anpassen. Die erste Zeile mit "$SETUP," löschen. Danach lassen sich die Logs auch in LogView laden.
Als Gerät dazu NMEA auswählen. Und dann über Datei -> Gerätedaten importieren ... auswählen.
Der GPS Logger wird in der nächsten Version dann komplett eingebunden und man kann dann auch die Zusatzdaten auswerten (wie z.B. die Infos vom angeschlossenen UniLog).
Und nun viel Spass mit der neuen Version !
Grüße vom LogView Team
")
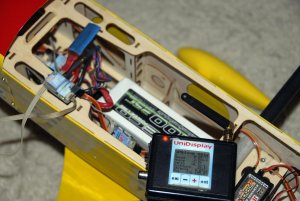

 Hast Du den GPS Sensor mit Strom versorgt beim Auslesen über den Terminal!? Die Schnittstelle versorgt den Sensor nicht mit Strom! D.h. zusätzlich einfach Batterie anschliessen und nochmal versuchen...
Hast Du den GPS Sensor mit Strom versorgt beim Auslesen über den Terminal!? Die Schnittstelle versorgt den Sensor nicht mit Strom! D.h. zusätzlich einfach Batterie anschliessen und nochmal versuchen...")