Und weiter gehts ")
Und weiter gehts
So,
nächste Frage. Wie ihr wisst, soll für die Wintersaison ein Tricopter mit der MultiWii Steuerung entstehen. Da ich morgen mal wieder ne Bestellung bei den Chinesen habe, habe ich mir gedacht, dass ich die nötigen Teile für den Tri gleich mitbestelle.
Mein Tri soll für die Zukunft so motorisiert sein, dass ich auch FPV-Flüge machen kann. Nun habe ich diese Motoren und Regler hier ins Auge gefasst:
Motoren
Regler
Der Tri soll mit 3s und 10x4,5 Propellern geflogen werden.
Nur der Rahmen wiegt um die 300g. Ich schätze das Endgewicht auf ca. 1,3kg.
Nun zu meiner eigentlichen Frage: Reicht das Setup aus Reglern und Motoren, damit ich genug Leistung habe?
Linux
Und weiter gehts
So,
nächste Frage. Wie ihr wisst, soll für die Wintersaison ein Tricopter mit der MultiWii Steuerung entstehen. Da ich morgen mal wieder ne Bestellung bei den Chinesen habe, habe ich mir gedacht, dass ich die nötigen Teile für den Tri gleich mitbestelle.
Mein Tri soll für die Zukunft so motorisiert sein, dass ich auch FPV-Flüge machen kann. Nun habe ich diese Motoren und Regler hier ins Auge gefasst:
Motoren
Regler
Der Tri soll mit 3s und 10x4,5 Propellern geflogen werden.
Nur der Rahmen wiegt um die 300g. Ich schätze das Endgewicht auf ca. 1,3kg.
Nun zu meiner eigentlichen Frage: Reicht das Setup aus Reglern und Motoren, damit ich genug Leistung habe?
Linux
") ) eine Garantie!
) eine Garantie!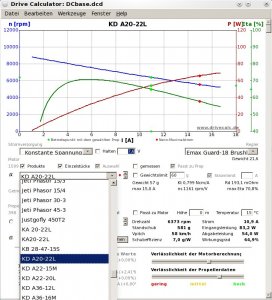
 :rolleyes:")
.JPG")