Hallo,
zum Zwecke der künstlichen Längsstabilität habe ich gerade (ernüchternde) Erfahrungen mit dem dazu nötigen Anstellwinkelsensor gemacht. Ich habe jetzt drei verschiedene Varianten ausprobiert, die von den Abmessungen her dem entsprechen, was Helmut Schenk in "Versuche mit künstlicher Längsstabilität" (FMT-Kolleg, Heft 6, 1989) vorgestellt hat: symmetrische Windfahne, ca. 60mm Spannweite, 15mm tief, Endleiste ca. 65mm hinter dem Drehpunkt.
Nun haben Auswertungen von (leider sehr kurzen) Gleitflügen gezeigt, dass die Windfahne dem wirklichen Anstellwinkel überlagerte Schwingungen misst, die da vermutlich gar nicht sind: Frequenz 5Hz bis 9Hz, Spitze-Spitze bis zu 4°. Gleichzeitig mit der dritten Sorte Windfahne habe ich einen Drehratensensor (Gyro) eingebaut und auch dessen Signal aufgezeichnet: es zeigt nix von dieser Frequenz.
Die Windfahnen unterscheiden sich folgendermaßen:
1. Variante: nur eine Lage Kohlefaser, außer dem Magnet und wenig Blei zwischen Magnet und Drehachse ist kein Ausgleichsgewicht nötig. Schwingt, aber genaues kann ich nicht mehr sagen, weil die Versuche schon länger her sind und ich die Datenaufzeichnung selbst nicht mehr habe.
2. Variante: die Windfahne ist dicker (stabiler und schwerer), daher habe ich Blei zum Ausgleich deutlich vor dem Magnet angebracht. Damit hat diese Variante ein deutlich größeres Trägheitsmoment.
3. Variante: die Windfahne hat ein Keilförmiges Profil (vorne spitz, hinten dick). Leider noch etwas schwerer (und träger) als die zweite Variante, ich habe das Blei weiter vorne angebracht.
Zwischen den zwei letzten Varianten gibt es keinen deutlich sichtbaren Unterschied im Messergebnis, der Keil scheint nix zu bringen. Weil auch die erste Variante geschwungen hat, gehe ich davon aus, dass auch eine deutliche Reduktion des Trägheitsmoments nicht hilft.
Eine davon wirklich abweichende Variante ist eine weniger gestreckte Windfahne mit deutlicher Nasenpfeilung, wie sie Helmut Lelke benutzt hat (http://www.charlesriverrc.org/articles/asfwpp/helmutlelke_asfwpp.htm).
Ich bin mit der zweiten Variante schon geregelt geflogen, aber letztlich ist das gemessene Signal dazu nicht sauber genug. Für eine nachträgliche Filterung ist die Frequenz einfach zu klein und den Einbau einer mechanischen Dämpfung stelle ich mir nicht einfach vor...
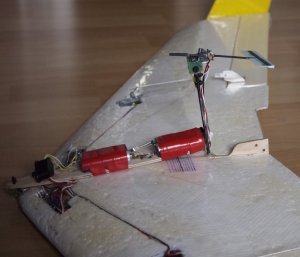
Zum Einbauort: die erste Variante saß in der Endleiste der Seitenflosse eines Brett-NFs, ziemlich weit oben. Die zwei letzten Varianten auf einem Zagi-ähnlichen NF, befestigt auf einem Mast ca. 11cm über dem Flügel, kurz hinter dem Schwerpunkt.
Hat jemand damit Erfahrung und kann etwas zu möglichen Ursachen oder Maßnahmen zur Abhilfe sagen? Oder kennt jemand ein Design, das sicher funktioniert?
Gruß,
Jens
zum Zwecke der künstlichen Längsstabilität habe ich gerade (ernüchternde) Erfahrungen mit dem dazu nötigen Anstellwinkelsensor gemacht. Ich habe jetzt drei verschiedene Varianten ausprobiert, die von den Abmessungen her dem entsprechen, was Helmut Schenk in "Versuche mit künstlicher Längsstabilität" (FMT-Kolleg, Heft 6, 1989) vorgestellt hat: symmetrische Windfahne, ca. 60mm Spannweite, 15mm tief, Endleiste ca. 65mm hinter dem Drehpunkt.
Nun haben Auswertungen von (leider sehr kurzen) Gleitflügen gezeigt, dass die Windfahne dem wirklichen Anstellwinkel überlagerte Schwingungen misst, die da vermutlich gar nicht sind: Frequenz 5Hz bis 9Hz, Spitze-Spitze bis zu 4°. Gleichzeitig mit der dritten Sorte Windfahne habe ich einen Drehratensensor (Gyro) eingebaut und auch dessen Signal aufgezeichnet: es zeigt nix von dieser Frequenz.
Die Windfahnen unterscheiden sich folgendermaßen:
1. Variante: nur eine Lage Kohlefaser, außer dem Magnet und wenig Blei zwischen Magnet und Drehachse ist kein Ausgleichsgewicht nötig. Schwingt, aber genaues kann ich nicht mehr sagen, weil die Versuche schon länger her sind und ich die Datenaufzeichnung selbst nicht mehr habe.
2. Variante: die Windfahne ist dicker (stabiler und schwerer), daher habe ich Blei zum Ausgleich deutlich vor dem Magnet angebracht. Damit hat diese Variante ein deutlich größeres Trägheitsmoment.
3. Variante: die Windfahne hat ein Keilförmiges Profil (vorne spitz, hinten dick). Leider noch etwas schwerer (und träger) als die zweite Variante, ich habe das Blei weiter vorne angebracht.
Zwischen den zwei letzten Varianten gibt es keinen deutlich sichtbaren Unterschied im Messergebnis, der Keil scheint nix zu bringen. Weil auch die erste Variante geschwungen hat, gehe ich davon aus, dass auch eine deutliche Reduktion des Trägheitsmoments nicht hilft.
Eine davon wirklich abweichende Variante ist eine weniger gestreckte Windfahne mit deutlicher Nasenpfeilung, wie sie Helmut Lelke benutzt hat (http://www.charlesriverrc.org/articles/asfwpp/helmutlelke_asfwpp.htm).
Ich bin mit der zweiten Variante schon geregelt geflogen, aber letztlich ist das gemessene Signal dazu nicht sauber genug. Für eine nachträgliche Filterung ist die Frequenz einfach zu klein und den Einbau einer mechanischen Dämpfung stelle ich mir nicht einfach vor...
Zum Einbauort: die erste Variante saß in der Endleiste der Seitenflosse eines Brett-NFs, ziemlich weit oben. Die zwei letzten Varianten auf einem Zagi-ähnlichen NF, befestigt auf einem Mast ca. 11cm über dem Flügel, kurz hinter dem Schwerpunkt.
Hat jemand damit Erfahrung und kann etwas zu möglichen Ursachen oder Maßnahmen zur Abhilfe sagen? Oder kennt jemand ein Design, das sicher funktioniert?
Gruß,
Jens
") .
.") - nur zum Messen des Winkels der anströmenden Luft. Dazu sollte er m.M.n. möglichst reibungsfrei gelagert werden und ebenso möglichst reibungsfrei ein Messwert abgegriffen werden können. Warum sollte seine Bewegung irgendwie gedämpft werden? Wenn dieser Sensor eine halbwegs sinnvolle Form hat, was bei den von dir beschriebenen der Fall ist, so ist ein eventuelles Pendeln eher einer verwirbelten Strömung zuzuschreiben. Vielleicht wäre es besser, ihn ganz vorne am Rumpf anzubringen, wenn notwendig an einer verlängerten Rumpfspitze.
- nur zum Messen des Winkels der anströmenden Luft. Dazu sollte er m.M.n. möglichst reibungsfrei gelagert werden und ebenso möglichst reibungsfrei ein Messwert abgegriffen werden können. Warum sollte seine Bewegung irgendwie gedämpft werden? Wenn dieser Sensor eine halbwegs sinnvolle Form hat, was bei den von dir beschriebenen der Fall ist, so ist ein eventuelles Pendeln eher einer verwirbelten Strömung zuzuschreiben. Vielleicht wäre es besser, ihn ganz vorne am Rumpf anzubringen, wenn notwendig an einer verlängerten Rumpfspitze.