Holger Lambertus
User
Hi Leute
Sorry, wir waren in den Vorbereitungen dermassen vertieft, das ich die Beiträge und PN hier ganz vergessen habe.
Am WE sind in Ballenstedt Weltrekordversuche, wir treten als Team in vier Solar-Klassen an, das Wetter wird wohl nicht optimal, schaunmamalgugg
Wer es am WE etwas verfolgen möchte: http://www.rc-network.de/forum/showthread.php/506273-WR-Versuche-2015
Infos zum aktuellem Rekordhalter: http://www.ouest-france.fr/record-mondial-pour-lavion-solaire-miniature-2709652
Solarregler;
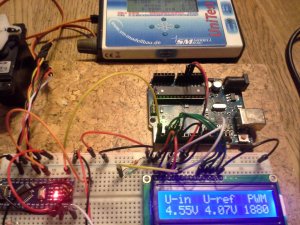
Was unsere Platine macht:
Verkabelung; Solarpanel > Platine mit Sensoren und Prozessor > BL-Regler
An die Platine wird der "Gaskanal" vom BL-Regler angeschlossen, von dort ein Kabel an den Empfänger-Gaskanal.
Sie misst/bestimmt den MPPT-Arbeitspunkt im Prozessor, und regeltdann über den BL Regler in Teillast diesen optimalen Arbeitpunkt ein.
Wendet man sich der Sonne ab, oder es kommt eine Wolke, regelt sie entsprechend über die Regler-PWM die Leistung herunter, und andersherum entsprechend hoch.
Nebenher sendet das Platinchen alle verfügbaren Daten an den Sender, Antriebsdaten, Leistung, Drehzahl, Regler-PWM, Höhe (Vario), etc.
Es sollte ein Regler sein, bei dem das Knüppelsetup deaktivierbar ist, sonst kann es passieren das man bei einer blöden Situation (Flug durch einen Schatten/ Baumreihe, Rolle, Looping) plötzlich im Programmiermodus landet. Ideal sind die kleinen Mulitcopterregler mit der SimonK Software.
Sonnenwinkel;
Die Sunpowerzellen sind hier ähnlich wie Polykristaline Zellen weniger anfällig, bei den typischen Mono spürt man jedes Grad im Winkel.
Zur Zeit expermentieren wir mit verschiedenen Oberflächen auf den Zellen, quasi rauh, Prismen, wodurch sich noch ein bissl mehr Toleranz beim Fehlwinkel ergibt.
Sorry, wir waren in den Vorbereitungen dermassen vertieft, das ich die Beiträge und PN hier ganz vergessen habe.
Am WE sind in Ballenstedt Weltrekordversuche, wir treten als Team in vier Solar-Klassen an, das Wetter wird wohl nicht optimal, schaunmamalgugg
Wer es am WE etwas verfolgen möchte: http://www.rc-network.de/forum/showthread.php/506273-WR-Versuche-2015
Infos zum aktuellem Rekordhalter: http://www.ouest-france.fr/record-mondial-pour-lavion-solaire-miniature-2709652
Solarregler;
Was unsere Platine macht:
Verkabelung; Solarpanel > Platine mit Sensoren und Prozessor > BL-Regler
An die Platine wird der "Gaskanal" vom BL-Regler angeschlossen, von dort ein Kabel an den Empfänger-Gaskanal.
Sie misst/bestimmt den MPPT-Arbeitspunkt im Prozessor, und regeltdann über den BL Regler in Teillast diesen optimalen Arbeitpunkt ein.
Wendet man sich der Sonne ab, oder es kommt eine Wolke, regelt sie entsprechend über die Regler-PWM die Leistung herunter, und andersherum entsprechend hoch.
Nebenher sendet das Platinchen alle verfügbaren Daten an den Sender, Antriebsdaten, Leistung, Drehzahl, Regler-PWM, Höhe (Vario), etc.
Es sollte ein Regler sein, bei dem das Knüppelsetup deaktivierbar ist, sonst kann es passieren das man bei einer blöden Situation (Flug durch einen Schatten/ Baumreihe, Rolle, Looping) plötzlich im Programmiermodus landet. Ideal sind die kleinen Mulitcopterregler mit der SimonK Software.
Sonnenwinkel;
Die Sunpowerzellen sind hier ähnlich wie Polykristaline Zellen weniger anfällig, bei den typischen Mono spürt man jedes Grad im Winkel.
Zur Zeit expermentieren wir mit verschiedenen Oberflächen auf den Zellen, quasi rauh, Prismen, wodurch sich noch ein bissl mehr Toleranz beim Fehlwinkel ergibt.
")
")