Leider grad nicht so die Zeit, darum ne Kurzversion.
Im Anhang ein ExcelFile das die Berrechnung meines aktuellen MPP regler durchpielt zum simulieren, die Formeln sind ja darin hinterlegt, da sieht man besser wie dér arbeitet.
Das ExcelFile
Anhang anzeigen DynMPP.ods
Es ist nicht leicht passende Kurven im Inet zu finden, ohne selber welche fälschen zu müssen

Hier sind passende (Quelle).
https://www.esig.energy/wiki-main-page/pscad-modules-representing-pv-generator/
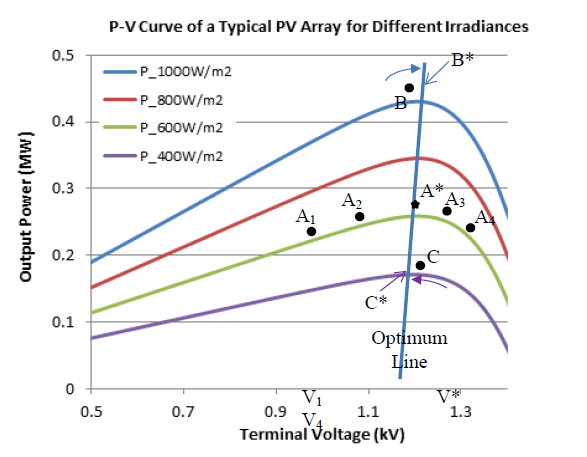
Auf dem Bild sieht man den MPP als "opimum-Line" idealisiert für eine fixe Temperatur, der Bereich 400-1000W/m² ist für uns interessant.
Die Parameter der Software bzw des Excel-Files.
Den Punkt (B) oben für 1000W/m² muss ich kennen, er ergibt sich auch aus dem Datenblatt, aber besser ist es ihn einzumessen.
Der zweite Parameter ist quasi die Schräge / der Winkel der "Optimum-line" Drehpunkt am B-Punkt der bestimmt werden muss. Auf dieser schräge Limie arbeitet der MPP nachher auf und ab Die Höhe auf der schiefen Bahn wird stumpf durch die ausgehende PWM zum Regler ermittelt, weil, ist die PWM hoch ist ergo auch die Leistung hoch, und umgekehrt.
Der Regler legt das im ca. 200Hz Takt neu fest, in der Hauptschleife rennt ganz normal die altbekannte fixed-Voltage Routine mit ca. 8KHz, so pumpt und schwingt die Regelung nicht, alles rennt sauber und stabil.
Sämtliche Parameter habe ich zum experimentieren als Drehregler im Moment auf dem Sender, plus einen Schalter OFF / fixed-Voltage / dyn.MPP (lese dafür das SumSignal ein).
Das Ganze hat aber den Nachteil, es ist von der einmaligen Abstimmung inkl des Propellers abhängig, und das genze neigt in irgendwelchen abstrusen Flugfiguren wie Rückenflachtruden mit Nasenbohren zu geringfügigen Fehlinterpretationen, kann durch die Berrechnungsgrundlage des MPP nicht erst nicht in einem wirklich schlechtem Berreich wandern, da stets auch das untere Ende der "optimum.Line" die mindestSpannung und das obere Ende die Maximalspannung darstellt.
Nun die Temperatur:
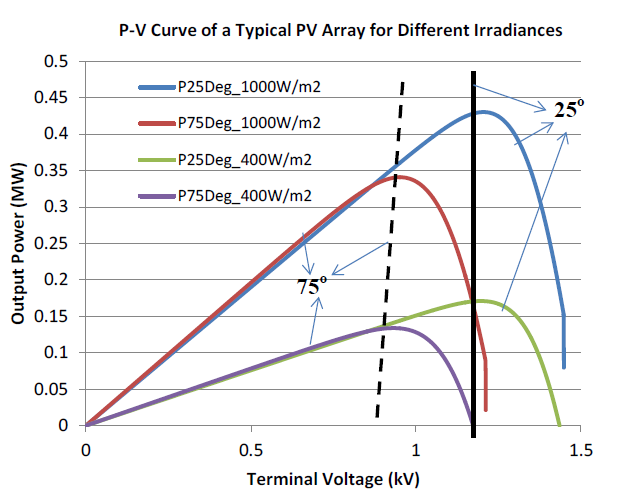
Zusätzlich schiebe ich den ganzen Kurvenquatsch per Tempsensor am Rumpf einfach horizontal hin und her, und zwar exakt nach Datenblatt, 1,84mV/°C, das passt perfekt. Das ganze ist im Excel im oberen Kasten. Das passiert nur alle 2100mS, immer wenn der Wachhund zur Unterbrechung bellt.
Am WE kann ich dann auch mal den Code etwas rausputzen und hier reinstellen, der sieht nach tausendmal angeflicke und umgestricke grad echt schlimm aus, das ich selber schon fast nicht mehr durchblick,
 :rolleyes:")
, Wenn interesse... Aber wie gesagt, ist nix für mal-eben-aus-die-Tüte, man muss sich damit beschäftigen, messen, abgleichen, u.s.w., aber dann rennt das richtig gut.
Man könnte noch weiter optimieren, z.B. den Winkel bei steigender Temp auch erhöhen, aber ich liege in den Logs bereits jetzt nie weiter als 0,1V vom theoretischem MPP weg, das ist Quasi Verlustfrei (0,irgendwas kleines).
") ) nun funzte das auch im Flug, aber das Log war gruselig, die meiste Zeit klebte der MPP an einem Ende, oft sogar 6V bei hoher Leistung, und 6,5V bei geringer Leistung, das ist falsch, und der Rest dazwischen war ja eh nicht vernünftig auswertbar, wegen dem Flachdach, eigentlich zu Hälfte der Zeit ein 6/6,5V Schalter nach Zufall, und ab und zu ein bissl real-MPP.
) nun funzte das auch im Flug, aber das Log war gruselig, die meiste Zeit klebte der MPP an einem Ende, oft sogar 6V bei hoher Leistung, und 6,5V bei geringer Leistung, das ist falsch, und der Rest dazwischen war ja eh nicht vernünftig auswertbar, wegen dem Flachdach, eigentlich zu Hälfte der Zeit ein 6/6,5V Schalter nach Zufall, und ab und zu ein bissl real-MPP.
")