Du verwendest einen veralteten Browser. Es ist möglich, dass diese oder andere Websites nicht korrekt angezeigt werden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
Solarflieger
- Ersteller Lupo01
- Erstellt am
-
- Schlagworte
- solarzelle
Aufhören bitte, galt auch für Dich, Holger.
Könnt ihr den privaten Mist nicht aus dieser Diskussion rauslassen?
Naja, ich bin hier jetzt raus, bringt ja nichts...
Vielen Dank Marvin,
Genau so sehe ich das auch!
- Es gibt nun mal 2 ... oder in Zukunft auch mal 3 Wege um ans Ziel zu kommen.
Was Sinnvoller, Besser, Einfacher oder ganz einfach Reizvoller ist,
wird sich im laufe der Zeit von alleine bei den Wettbewerben zeigen.
Daher ein letztes mal die Bitte an die Beiden Herren
in friedlicher Koexistenz dieses schöne Thema weiter voran zu bringen.
Konkurrenz belebt das Geschäft sagt man auch im Volksmund.
Danke !
Gruß
Andreas
eifeljeti
User
Du meine Güte,
war man kaum mal ein Jahr weg aus der Szene, geht der Punk ab.
Ich hoffe ich kann nun endlich noch mal wieder "mit angreifen".
Die ganze Regler-Diskussion finde ich etwas befremdlich, sei´s drum.
Ich muss noch meinen Arduino-MPPt testen, den Regler von Holger ebenfalls, und von Julian werde ich auch mal einen ordern.
Thema TVS Diode: erscheint mir sinnvoll, kost nix, kann evtl. nur helfen. Meine fachlichen Kenntnisse reichen für eine Beurteilung in Tiefe nicht aus ,
den ESR-Angst-Kondensator im RC-Circuit macht ja auch mittlerweile fast jeder rein (der, der einen YEP stärker kurzbelastet) ...
Den letzten, von mir aber noch nicht praxiserprobten Ardunio Code , stell ich mal hier rein .. bei Fragen .. fragen, ist aber 2 Jahre her, weiss nicht mehr alles im Detail ....
Zumindest "auf dem TISCH" machte es mit stark wechselnden Vin was es sollte ....
gruss
war man kaum mal ein Jahr weg aus der Szene, geht der Punk ab.
Ich hoffe ich kann nun endlich noch mal wieder "mit angreifen".
Die ganze Regler-Diskussion finde ich etwas befremdlich, sei´s drum.
Ich muss noch meinen Arduino-MPPt testen, den Regler von Holger ebenfalls, und von Julian werde ich auch mal einen ordern.
Thema TVS Diode: erscheint mir sinnvoll, kost nix, kann evtl. nur helfen. Meine fachlichen Kenntnisse reichen für eine Beurteilung in Tiefe nicht aus ,
den ESR-Angst-Kondensator im RC-Circuit macht ja auch mittlerweile fast jeder rein (der, der einen YEP stärker kurzbelastet) ...
Den letzten, von mir aber noch nicht praxiserprobten Ardunio Code , stell ich mal hier rein .. bei Fragen .. fragen, ist aber 2 Jahre her, weiss nicht mehr alles im Detail ....
Code:
// neue Steuerung (c) eifeljeti , based on Holle
// Board: SparkFun Pro Micro
// CPU: AtMega 32u4 (5v,16 MHz)
// Boardverwalter:
// https://raw.githubusercontent.com/sparkfun/Arduino_Boards/master/IDE_Board_Manager/package_sparkfun_index.json
// Software: Arduino IDE 1.6.8
// PinOut fuer SparkFun Pro Micro
// Pin D5 --- Eingang kommend vom RX "Gaskanal" (PWM-Leitung)
// Pin D9 --- Ausgang gehend zum Regler (PWM-Leitung)
// Pin A0 --- + von Solarpanel ueber Spannungsteiler fuer Leerlaufspannung 2,4 - 2,56V am diesem Pin <<<RAW-105K-A0-25K-GND>>
// Pin GND --- - Minus von Solarpanel, und Masse von Rx
// Pin RAW --- + von Solarpanel 6 bis 12V
// Folgende Werte koennenn zur Optimierung an das verwendete Modell angepasst werden:
// Speed: quasi die Geschwindigkeit der Regelung, ist der Wert zu hoch, ist reagiert der Motor traege im Anlauf, ist der Wert zu niedrig, beginnt das System zu schwingen.
// Speeddifferenz: schnellerer Sprungwert zum Runterregeln des Motors bei Abfall der Solarspannung
int Speed = 200; // verzoegerungswert der Loop-Schleife (sinvolle Werte von 100 bis 1500)
int Speeddifferenz = 20; // differenzsprung nach unten (sinvolle Werte von 5 bis 50)
#include <Servo.h>
Servo Reglerpin;
int ReglerWert = 1089; // wir initialisieren mit Gaswert und damit Hebel auf NULL
int SolarPin = A0; // Solarpanel wird per Spannungsteiler an Pin A0 angeschlossen
int Solarspannung; // enthaelt spaeter den Wert 0-1023 bezogen auf 0 bis 12v
int EmpfaengerPin = 5; // Empfaenger Gaskanal wird an Pin 5 angeschlossen
int Empfaengerimpuls;
int Realimpulsein ;
int Reglerimpuls ;
int OrigSOLAR ;
double Realspannung; // DEBUG Ausgabevariable fuer Umrechnung
int VorherigeSolarspannung = 600; // und wir kamen von 7 volt ...
void setup()
{
analogReference(3); // setzen der Referenzspannugn auf internal 2.56v
pinMode(EmpfaengerPin, INPUT); // Schaltet den Empfaenger-Pin auf Eingang
Reglerpin.attach(9); // Regler wird an Pin D9 angeschlossen
Reglerpin.writeMicroseconds(1089); // Reglerinitialisierung
delay(3000); // Reglerinitialisierung
Serial.begin(57600); // Serielle Schnittstelle auf 57600 Baud festlegen // NUR DEBUG
}
void loop()
{
Empfaengerimpuls = pulseIn(EmpfaengerPin, HIGH, 40000); // Empfaengerimpuls einlesen 1089-1880
if (Empfaengerimpuls > 1870) // und Ausreisser in der Uebertragung eleminieren durch harte Grenzen
{
Empfaengerimpuls = 1870 ;
}
if (Empfaengerimpuls < 1090)
{
Empfaengerimpuls = 1090 ;
}
Realimpulsein = Empfaengerimpuls;
Empfaengerimpuls = map(Empfaengerimpuls, 1090, 1870, 0, 1023); // Empfaengerimpuls umbauen auf 0-1023 und invertiert
Reglerimpuls = map(ReglerWert, 1090, 1870, 0, 1023); // Frame in uSek. umsetzten auf 10 Bit Dig. Wert
// Serial.print (" OrigSOLAR: "); // DEBUG BLOCK AUSGABE
// Serial.print (OrigSOLAR); //Ausgabe der Werte der Solarspannung
Serial.print (" Solarspannung: "); // DEBUG BLOCK AUSGABE
Serial.print (Solarspannung); //Ausgabe der Werte der Solarspannung
// Serial.print (" Reale Spannung: ");
// Serial.print (Realspannung);
// Serial.print (" Frame-us: ");
// Serial.print (Realimpulsein); //Ausgabe des Wertes fuer den Empfaengerimpuls
Serial.print (" Empfaengerimpuls: ");
Serial.print (Empfaengerimpuls); //Ausgabe des Wertes fuer den Empfaengerimpuls
Serial.print (" Reglerwert: ");
Serial.print (ReglerWert); //Ausgabe des Wertes fuerr den Reglerwert
Serial.println("");
delay(100); // NUR DEBUG verzögerte Ausgabe fuer serielle Darstellung am PC
Solarspannung = analogRead(SolarPin); // Solarspannung einlesen 0-1023
OrigSOLAR = Solarspannung;
Solarspannung += 66; // Anpassungsfaktor auf Spannungsteiler bei 12V am Teiler = max. Eingangsspg.
if (Solarspannung >= 460 && Solarspannung < 616) // Bereichskorrektur zwischen 5 und 7 v
{
Solarspannung -= 24;
}
if (Solarspannung >= 616 && Solarspannung < 698) // Bereichskorrektur zwischen 7 und 8 v
{
Solarspannung -= 20;
}
if (Solarspannung >= 698 && Solarspannung <= 890) // Bereichskorrektur zwischen 8 und 10 v
{
Solarspannung -= 18;
}
Realspannung = Solarspannung / 85.3; // NUR DEBUG
// #################### Beginn Motoregelung #####################
if (VorherigeSolarspannung < Solarspannung && Solarspannung > 600 && ReglerWert < Empfaengerimpuls && Empfaengerimpuls > 3) {
ReglerWert += 1; //Hochlaufzeit
//Serial.print ("mehr gas auf motor");
}
if (VorherigeSolarspannung > Solarspannung && Solarspannung > 600 && ReglerWert > Empfaengerimpuls && Empfaengerimpuls > 3) {
ReglerWert = ReglerWert - Speeddifferenz; //Runterlaufzeit
//Serial.print ("weniger gas auf motor");
}
if (Empfaengerimpuls < 3 || Solarspannung <= 600) // Gashebelposition ist NULL ODER Solarspannung
{ // bei ca. 7V angelangt, also MotorSTOPP einleiten und halten !
ReglerWert = 1090 ;
}
VorherigeSolarspannung = Solarspannung ;
Reglerpin.writeMicroseconds(ReglerWert);
delayMicroseconds(Speed);
}Zumindest "auf dem TISCH" machte es mit stark wechselnden Vin was es sollte ....
gruss
So Leute,
leider habe ich gestern nicht alle Posts verschwinden lassen,
welche sich um Eure Streitereien drehen.
Daher habe ich jetzt noch mal durchgefegt.
Sollte in den nächsten Tagen diesbezüglich keine Ruhe einkehren,
müsste ich unter Umständen den Thread befristet schließen,
oder gar zu drastischeren Sanktionen greifen,
was mir bei dem tollen Thema widerstrebt.
######
Ich sage es noch mal ganz deutlich für alle.
Jede Art der Herangehensweise hat ihre Berechtigung!
Wer was und warum nutzt, weil man gerne selber noch etwas tüfteln mag
oder einfach auf plug and play setzt, das bleibt jedem selbst Überlassen.
Welches System bei Wettbewerben überlegen oder gar besser ist,
kann man nur mittels mehreren Wettbewerben ermitteln,
wo sich die verschiedenen Antriebe gegenüber stehen.
Gruß
Andreas
leider habe ich gestern nicht alle Posts verschwinden lassen,
welche sich um Eure Streitereien drehen.
Daher habe ich jetzt noch mal durchgefegt.
Sollte in den nächsten Tagen diesbezüglich keine Ruhe einkehren,
müsste ich unter Umständen den Thread befristet schließen,
oder gar zu drastischeren Sanktionen greifen,
was mir bei dem tollen Thema widerstrebt.
######
Ich sage es noch mal ganz deutlich für alle.
Jede Art der Herangehensweise hat ihre Berechtigung!
Wer was und warum nutzt, weil man gerne selber noch etwas tüfteln mag
oder einfach auf plug and play setzt, das bleibt jedem selbst Überlassen.
Welches System bei Wettbewerben überlegen oder gar besser ist,
kann man nur mittels mehreren Wettbewerben ermitteln,
wo sich die verschiedenen Antriebe gegenüber stehen.
Gruß
Andreas
derjuwi
User
Trari trara ähm... UPS ist da...
Trari trara ähm... UPS ist da...
Kuck mal was der nette Mann heute dagelassen hat

~11x16 Zoll
Hat einer eine Idee wie man die mit einer 11x12 objektiv vergleichen kann?
Gefühlt funktionieren alle gedruckten bisher besser als die gekauften, die schlanken Blätter waren etwas mehr allround(Gutes steigen und schnell).
Breites Blatt steigt etwas besser...
Grüße Julian
Trari trara ähm... UPS ist da...
Kuck mal was der nette Mann heute dagelassen hat
~11x16 Zoll
Hat einer eine Idee wie man die mit einer 11x12 objektiv vergleichen kann?
Gefühlt funktionieren alle gedruckten bisher besser als die gekauften, die schlanken Blätter waren etwas mehr allround(Gutes steigen und schnell).
Breites Blatt steigt etwas besser...
Grüße Julian
derjuwi
User

Von oben nach unten:
- neue 11x16 am neuen Spinner
- breites Blatt aelter an standard Mittelstueck (ja, das sind Grasflecken am Blatt
") )
)- schmales Blatt aelter (Schwarz)
- alter Spinner (sah scheisse aus
)
- und nochmal altes breites gegen neues schmales Blatt

neues Mittelstueck von unten, der schwarze Fleck neben der Bohrung ist vom "Spritzbaum"an dem alles zusammenhing.

Der Spinner ist etwas kleiner als der Rumpf und erlaubt so Ringfoermig Kuehlluft

Blaetter liegen gut an
")
Ich mache die Blattwurzel noch etwas massiver, dann passt es
Der Satz da oben (Spinner +3 Blatter) kostet ~17 Euro + Versand, was ich ziemlich ok finde
Gruesse Julian
Anhänge

Holger Lambertus
User
Für den Vergleich das (wahrscheinlich) einfachste Propellerwirkungsgrad-Messgerät der Welt für Stand und Flug:
WägeZelle (Sensor) aus 1€ Flohmarkt Waage bzw. der defekten Harz-Waage
HX711 Sensor (ca. 1€)
Eine alte Prog-Box (oder ein Arduino)
Unitest2 (oder Openlog, oder oder....)
Die Propbox ist ja quasi ein Arduino mit einem Atmega168, Schaltpläne diverser Boxen beim Olli: http://www.olliw.eu/2012/turnigy-dlux-box/
Zwei Taster der Box mussten dem HX711 weichen, die rechte Taste ist nun zum Nullen, die davor zum auswählen verschiedener Wägenzellen. Das Display zeigt den gewogenen Wert an, und sendet ihn als Kern440 Serialprotokoll an das Unitest2, das dann den Wert mit sammt allen Elektrischen Werte und Drehzahl speichert.
Das ganze Brimborium kommt dann vorne mit einem Winkel aufs Fahrrad, dann kann bei allen möglichen Geschwindikeiten gemessen werden. Böige Tage sollte man dabei meiden. Autofenster hat sich nicht bewährt, wegen Aufwirbelungen, mit dem Fahrrad macht es eh mehr Spaß "gugg mal ein propellerbetriebenes E-Bike."
Ausgewertet wird dann daheim in Excel.
Für den Vergleich Props untereinenander passt es perfekt, bei "Absolutwerte" bin ich eher sketisch.
Im erstem Bild war der Blickwinkel doof gewählt, das Display der BOX sehr blass, Unitest und Box zeigen beide 8g

Links die kleine 500g Zelle aus der Harzwaage, die Grosse ist eine 5Kg Zelle.

Live wird immer mit zwei Solarflieger getestet, am besten mit jemandem der ein sehr ähnliches Modell und Flugstil hat. Wenn man parallel fliegt, sieht man sehr schnell welches Modell schneller ist, und welches besser steigt. Nach Propwechsel sieht man dann, wie sich die Dinge/Differenzen verändert haben, auch wenn man da dann eher Abstimmung statt Wirkungsgrad vergleicht (An dieser Stelle Gruß und Dank an Wilfried für die Geduld unzähliger Vergleichsflüge dieses Jahr).
Die 11x12 + 12x13 Aeronaut sind ordentlicher Alltagsprop, im freiem Handel preiswert erhälltlich, robust, aber eigentlich für höhere Leitung gebaut, darum relativ schwer, und sind nicht grad das Wirkungsdwunder.
Durch massives runterschleifen kann man ihn etwas verbessern (oder verschlechtern), dabei unbedingt gleich auch den Schwerpunkt der Blattaugen korrigieren, nebenher verliert er dabei noch etwa die Hälfte des Gewichtes.
WägeZelle (Sensor) aus 1€ Flohmarkt Waage bzw. der defekten Harz-Waage
HX711 Sensor (ca. 1€)
Eine alte Prog-Box (oder ein Arduino)
Unitest2 (oder Openlog, oder oder....)
Die Propbox ist ja quasi ein Arduino mit einem Atmega168, Schaltpläne diverser Boxen beim Olli: http://www.olliw.eu/2012/turnigy-dlux-box/
Zwei Taster der Box mussten dem HX711 weichen, die rechte Taste ist nun zum Nullen, die davor zum auswählen verschiedener Wägenzellen. Das Display zeigt den gewogenen Wert an, und sendet ihn als Kern440 Serialprotokoll an das Unitest2, das dann den Wert mit sammt allen Elektrischen Werte und Drehzahl speichert.
Das ganze Brimborium kommt dann vorne mit einem Winkel aufs Fahrrad, dann kann bei allen möglichen Geschwindikeiten gemessen werden. Böige Tage sollte man dabei meiden. Autofenster hat sich nicht bewährt, wegen Aufwirbelungen, mit dem Fahrrad macht es eh mehr Spaß "gugg mal ein propellerbetriebenes E-Bike.
"Ausgewertet wird dann daheim in Excel.
Für den Vergleich Props untereinenander passt es perfekt, bei "Absolutwerte" bin ich eher sketisch.
Im erstem Bild war der Blickwinkel doof gewählt, das Display der BOX sehr blass, Unitest und Box zeigen beide 8g
Links die kleine 500g Zelle aus der Harzwaage, die Grosse ist eine 5Kg Zelle.
Live wird immer mit zwei Solarflieger getestet, am besten mit jemandem der ein sehr ähnliches Modell und Flugstil hat. Wenn man parallel fliegt, sieht man sehr schnell welches Modell schneller ist, und welches besser steigt. Nach Propwechsel sieht man dann, wie sich die Dinge/Differenzen verändert haben, auch wenn man da dann eher Abstimmung statt Wirkungsgrad vergleicht (An dieser Stelle Gruß und Dank an Wilfried für die Geduld unzähliger Vergleichsflüge dieses Jahr).
Die 11x12 + 12x13 Aeronaut sind ordentlicher Alltagsprop, im freiem Handel preiswert erhälltlich, robust, aber eigentlich für höhere Leitung gebaut, darum relativ schwer, und sind nicht grad das Wirkungsdwunder.
Durch massives runterschleifen kann man ihn etwas verbessern (oder verschlechtern
), dabei unbedingt gleich auch den Schwerpunkt der Blattaugen korrigieren, nebenher verliert er dabei noch etwa die Hälfte des Gewichtes.eifeljeti
User
Ich hab zumindest im Keller für "das Kleinvieh" bis 300 Watt oder so zumindest hintendran noch einen Windmesser um Vpitch im Stand zu bestimmen.
Dabei sammle ich dann auch Drehzahl , Strom usw. mit ein.
Meist wirds aber nur eine mäßige Anzahl von Vergleichsflügen ... gegen mich selbst.
Bei meinen Modell-Geschwindigkeiten käm ich mit nem Fahrrad nicht mal ansatzweise in Regionen, wo noch was zu messen wäre ...
BTW: hat einer Zugriff auf nen Windkanal
Dabei sammle ich dann auch Drehzahl , Strom usw. mit ein.
Meist wirds aber nur eine mäßige Anzahl von Vergleichsflügen ... gegen mich selbst
.Bei meinen Modell-Geschwindigkeiten käm ich mit nem Fahrrad nicht mal ansatzweise in Regionen, wo noch was zu messen wäre ...
BTW: hat einer Zugriff auf nen Windkanal
Holger Lambertus
User
Moin Rudi
Ein Bekannter hat einen kleinen Windkanal gebaut, aus OSB, dickes Gebläse, die Luft geht dann untenrum wieder zurück zum Eingang, geht im Kreis durch. Als Gleichrichter sind da unzählig viele Strohhalme am Eingang.(solche wie bei MC). Da wäre Zugriff drauf.
Aber, Du hast doch dann nen Motor am Fahrrad, und bist dadurch schneller, :rolleyes:") '(Und hast danach nen EisBauch
'(Und hast danach nen EisBauch ) Bei uns gibt es gleich hinterm Haus eine ca. 500m leicht abschüssige unbefahrene Strasse, dort geht das recht gut. Für "Speedantriebe" geht das natürlich nicht. Eventuell ein Auto mit Kuhfänger vorne drann
) Bei uns gibt es gleich hinterm Haus eine ca. 500m leicht abschüssige unbefahrene Strasse, dort geht das recht gut. Für "Speedantriebe" geht das natürlich nicht. Eventuell ein Auto mit Kuhfänger vorne drann
Vpitch muss ich gestehen, mache ich immernoch rechnerisch. Das mit dem Windmesser zum "Prop-Steigung messen/vergleichen" werde ich auch mal probieren.
Ein Bekannter hat einen kleinen Windkanal gebaut, aus OSB, dickes Gebläse, die Luft geht dann untenrum wieder zurück zum Eingang, geht im Kreis durch. Als Gleichrichter sind da unzählig viele Strohhalme am Eingang.(solche wie bei MC). Da wäre Zugriff drauf.
Aber, Du hast doch dann nen Motor am Fahrrad, und bist dadurch schneller,
'(Und hast danach nen EisBauch) Bei uns gibt es gleich hinterm Haus eine ca. 500m leicht abschüssige unbefahrene Strasse, dort geht das recht gut. Für "Speedantriebe" geht das natürlich nicht. Eventuell ein Auto mit Kuhfänger vorne drannVpitch muss ich gestehen, mache ich immernoch rechnerisch. Das mit dem Windmesser zum "Prop-Steigung messen/vergleichen" werde ich auch mal probieren.
Holger Lambertus
User
Ich habe grad durch Zufall dieses PDF vom Emil Giezendanner gefunden, und mich gefreut wie ein kleines Kind. Darin findet sich ein höherauflösendes Foto von Fred Militky seinem Solarius (1976 erstes ungepuffertes Solarmodell).
Quelle: https://modellflugsport.ch/sites/default/files/mfs_03_titelstory.pdf
Ich möchte es hier reinstellen, damit es nicht verlorengeht, wenn jemand davon noch Bilder in höherer Quali hat, würde ich mich darüber sehr freuen, da ich es "Scale" nachbauen möchte. (ich vermute das dieses Bild es aus einem Graupner-Katalog stammt)

Habe grad mit Gerhard die Daten zusammengetragenm, das meiste steht im Solarbuch:
3x32 halbkreisrunde SiSolarzellen 57mm Solarex
Spannung ca. 13V max. ca. 10W
Motor Faulhaber 232/217 MS33
Getriebe 15:1
Propeller 300mm
Drehzahl: ca. 1200rpm
Spannweite 2060mm
HLW Fläche 9,2dm²
Flügelfläche 41,2dm²
Abfluggewicht 605g
Flächenbelastung 14,7g/dm²
Einzelgewichte:
Flügel: 124g
Höhenleitwerk: 16,5g
Empf. Batterie: 40g
Rumpf mit Motor Empfänger Servos und Solarzellen: 413g
Erstflug: 16.08.1976
Der Propeller sieht Electroprop550 (weisse Version) sehr ähnlich ??
Quelle: https://modellflugsport.ch/sites/default/files/mfs_03_titelstory.pdf
Ich möchte es hier reinstellen, damit es nicht verlorengeht, wenn jemand davon noch Bilder in höherer Quali hat, würde ich mich darüber sehr freuen, da ich es "Scale" nachbauen möchte. (ich vermute das dieses Bild es aus einem Graupner-Katalog stammt)
Habe grad mit Gerhard die Daten zusammengetragenm, das meiste steht im Solarbuch:
3x32 halbkreisrunde SiSolarzellen 57mm Solarex
Spannung ca. 13V max. ca. 10W
Motor Faulhaber 232/217 MS33
Getriebe 15:1
Propeller 300mm
Drehzahl: ca. 1200rpm
Spannweite 2060mm
HLW Fläche 9,2dm²
Flügelfläche 41,2dm²
Abfluggewicht 605g
Flächenbelastung 14,7g/dm²
Einzelgewichte:
Flügel: 124g
Höhenleitwerk: 16,5g
Empf. Batterie: 40g
Rumpf mit Motor Empfänger Servos und Solarzellen: 413g
Erstflug: 16.08.1976
Der Propeller sieht Electroprop550 (weisse Version) sehr ähnlich ??
derjuwi
User
Ich glaube wenn ich jetzt anfange einen Windkanal zu bauen bekomme ich Aerger zu Hause...
Waegekrams hab ich rumliegen, aber da kommt doch nix brauchbares rum... Auf dem Fahrrad hat man doch alleine durch die Erschuetterungen schon Hoelle Hoelle...
Vergleichsfliegen haben wir ja gemacht, geht aber grade kaum wegen Wind und Witterung...
Naja, ich schau mal. Rudi, magst du mal testen? Will aber wiederhaben
Gruesse Julian
Waegekrams hab ich rumliegen, aber da kommt doch nix brauchbares rum... Auf dem Fahrrad hat man doch alleine durch die Erschuetterungen schon Hoelle Hoelle...
Vergleichsfliegen haben wir ja gemacht, geht aber grade kaum wegen Wind und Witterung...
Naja, ich schau mal. Rudi, magst du mal testen? Will aber wiederhaben
Gruesse Julian
eifeljeti
User
Ich hab grad ganz andere Probleme ...
Bei 6.2 V Festspannung aus Netzteil dreht mein Axi 2212/34 mit ca 700kv nur ?? lt RPM etwa 1750 Touren bei 3.6 A,
Prop ist RFm 12x17, M=28mm.
6.6v 4.3A 1840 rpm
passt doch rechnerisch auch vor und hinten nicht ...
Da hatte ich doch deutlich mehr erwartet ...
Ich hoffe jetzt mal stark auf nen halben Messfehler des Drehzahlmessers, anonsten schmeiss ich den Kram in die Tonne ... obwohl Torque ist eigentlich schon "kräftig" auf den Rumpf am einwirken ..
Ich muss erstmal auf Sonne warten, mit dem Kellerlicht und nur 2 Händen krieg ich das nicht geregelt.
Bei 6.2 V Festspannung aus Netzteil dreht mein Axi 2212/34 mit ca 700kv nur ?? lt RPM etwa 1750 Touren bei 3.6 A,
Prop ist RFm 12x17, M=28mm.
6.6v 4.3A 1840 rpm
passt doch rechnerisch auch vor und hinten nicht ...
Da hatte ich doch deutlich mehr erwartet ...
Ich hoffe jetzt mal stark auf nen halben Messfehler des Drehzahlmessers, anonsten schmeiss ich den Kram in die Tonne ... obwohl Torque ist eigentlich schon "kräftig" auf den Rumpf am einwirken ..
Ich muss erstmal auf Sonne warten, mit dem Kellerlicht und nur 2 Händen krieg ich das nicht geregelt.
Holger Lambertus
User
Funzt bestens mit den Sensoren am Fahrrad, habe das letztes Jahr regelmässig genutzt.
Rudi.
12x17 ist auch arg gross.?
limitiert Dein Netzteil ?
Was für ein Regler ?
Wenn es ein klassischer BLHeli ist, probier mal so (da gibt es so mysteriöse Einstellkombis im Multicopter-Mode die dann am normalem Servokanal sonst nur Halbgas geben)

Rudi.
12x17 ist auch arg gross.?
limitiert Dein Netzteil ?
Was für ein Regler ?
Wenn es ein klassischer BLHeli ist, probier mal so (da gibt es so mysteriöse Einstellkombis im Multicopter-Mode die dann am normalem Servokanal sonst nur Halbgas geben
) Holger Lambertus
User
Moin Freunde der Sonne
In der Bucht sind neue 6" Semiflexible Zellen aufgetaucht. Besonders interessant für Vintage Solarselger, z.B. statt Schindelstrang, nachrüsten vorhandener Segler mit höherer Flächentiefe, u.s.w.
Ganz mit den Sunpower können sie nicht mithalten mit ca. 20% Wirkungsgrad, aber das ist trotzdem schon recht beachtlich.
Auf Länge (Spannweite) gesehen leisten sie aber etwas mehr als die 5" C60, auf Fläche gesehen etwas weniger.
Die Verluste durch die abgerundeten sind auf Fläche gesehen bei der 6" Zelle geringer als bei den 5" Zellen.
Sie sind vergleichsweise dick, etwa die alten A300 Sunpower, Gewicht weiss ich nicht.
Bei Elektronik und Verkabelung bitte drann denken: Kurzschlussstrom bis ca9A Impp ca.8A.
Aktuell gibt es Sie unter EBAY 223189906841 - per Google findet man sie in einigen Börsen und Shops.
Bildquelle: https://www.ebay.de/itm/4-6W-156-x-1...r=521992158521


In der Bucht sind neue 6" Semiflexible Zellen aufgetaucht. Besonders interessant für Vintage Solarselger, z.B. statt Schindelstrang, nachrüsten vorhandener Segler mit höherer Flächentiefe, u.s.w.
Ganz mit den Sunpower können sie nicht mithalten mit ca. 20% Wirkungsgrad, aber das ist trotzdem schon recht beachtlich.
Auf Länge (Spannweite) gesehen leisten sie aber etwas mehr als die 5" C60, auf Fläche gesehen etwas weniger.
Die Verluste durch die abgerundeten sind auf Fläche gesehen bei der 6" Zelle geringer als bei den 5" Zellen.
Sie sind vergleichsweise dick, etwa die alten A300 Sunpower, Gewicht weiss ich nicht.
Bei Elektronik und Verkabelung bitte drann denken: Kurzschlussstrom bis ca9A Impp ca.8A.
Aktuell gibt es Sie unter EBAY 223189906841 - per Google findet man sie in einigen Börsen und Shops.
Bildquelle: https://www.ebay.de/itm/4-6W-156-x-1...r=521992158521
Holger Lambertus
User
Doppelklickpost
Holger Lambertus
User
Julian, ich verstehe die Frage nicht wirklich.
Essentiell zum Propeller-vermessen ist das die exakte Wellenleistung bekannt ist. ,
Dafür nehme ich entweder das Drehmoment mit auf (Motor auf einer Wippe mit zweitem Wägesensor), dann ist es egal ob Teillast oder Vollast, das Unitest liest es über das Kern440 Protokoll mit ein, und zeigt direkt den Motor/Regler Wirkungsgrad und in Folge die Wellenleistung gebrauchsfertig an und loggt es mit. (Unitest2 ist schon was feines)
Alternativ rechne ich es per Drive-Calc zurück, dafür braucht es aber einen sehr sauber vermessenen Motor, die Propellermessungen müssen direkt nach der Motormessung erfolgen, und danach nochmal den Motor vermessen, um Fehler auszuschliesen.
Als MessMotor nehme ich etwas was eher einen breitbandigen Wirklunggrad hat, hoch braucht der nicht zu sein.
Auch der virtuelle Drehmomentprüfstand im Drivecalc funzt gut, wenn es auf Haaresbreite nicht ankommt, spuckt zwar nicht den Wirkungsgrad, aber man sieht nachher in der Antriebsberrechnung die Unterschiede der verschiedenen Propeller.
http://www.drivecalc.de/DC34/DCHelp/help_de.html#generate
Ansonsten Propcalc, da hat man dann die Kurven für verschiedene Geschwindigkeiten und Leistungen. Dort kann man schön seine Prioritäten umsetzen (Spitz vs Breitbanding abgestimmt).
Ein Propeller hat ja genauso wie ein Motor nicht einfach nur einen Wirkungsgrad. Das Ziel ist ja das jeweilige eta-max für beides zusammenzuführen, und beim Solarflieger muss das in einem besonders breitem Arbeitbereich erfolgen, hierfür ist Propcalc besonders hilfreich.
Regler-Teillastwirkungsgrad vermesse ich selten auf der Drehmomentkippe (Absolutwert), sondern der Einfachheit halber meist indem ich verschiedene Regler bzw Reglereinstellung (Timing, PWM-Frequenz, u.s.w.) mit dem Arduino in einem Zeitfenster von ca. 2Minuten hochfahre, und stumpf Drehzahl zu Eingangsleistung logge (keine Absolutwerte, nur Differenz). Die Messreihe wird kmpl. zweimal nacheinander durchgefahren um Temperaturfehler ausszuschliesen, da kommt dann z.B. sowas bei raus:
http://www.rc-network.de/forum/showthread.php/697467-Timing?p=4618614&viewfull=1#post4618614
Die Wellen in den Kurven sind wegen der geringen Framerate vom UT2
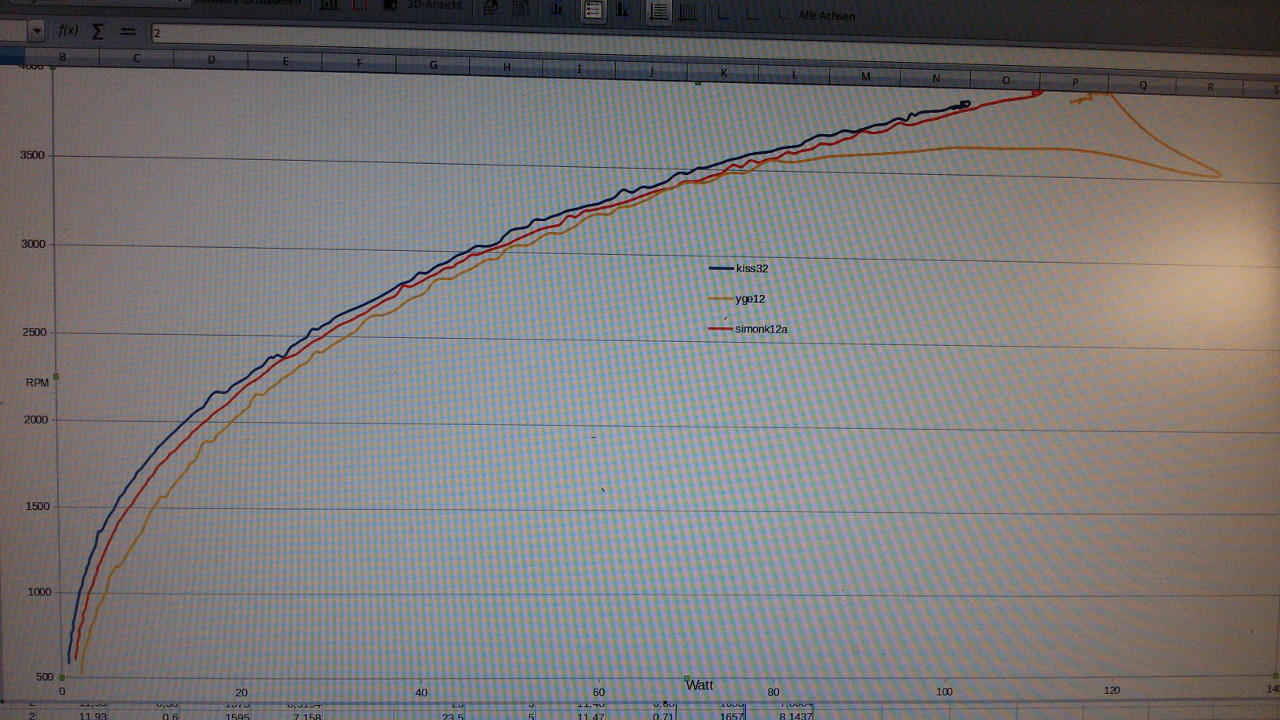
Edit, habe gestern mal spasseshalber nen Arduinocode für die alten Standard-Atmega8 Regler gebastelt, noch ohne Timing u.s.w., der schwebt dann im Vergleich nochmal zwei Finger breit unter den Kurven
Essentiell zum Propeller-vermessen ist das die exakte Wellenleistung bekannt ist. ,
Dafür nehme ich entweder das Drehmoment mit auf (Motor auf einer Wippe mit zweitem Wägesensor), dann ist es egal ob Teillast oder Vollast, das Unitest liest es über das Kern440 Protokoll mit ein, und zeigt direkt den Motor/Regler Wirkungsgrad und in Folge die Wellenleistung gebrauchsfertig an und loggt es mit. (Unitest2 ist schon was feines
)Alternativ rechne ich es per Drive-Calc zurück, dafür braucht es aber einen sehr sauber vermessenen Motor, die Propellermessungen müssen direkt nach der Motormessung erfolgen, und danach nochmal den Motor vermessen, um Fehler auszuschliesen.
Als MessMotor nehme ich etwas was eher einen breitbandigen Wirklunggrad hat, hoch braucht der nicht zu sein.
Auch der virtuelle Drehmomentprüfstand im Drivecalc funzt gut, wenn es auf Haaresbreite nicht ankommt, spuckt zwar nicht den Wirkungsgrad, aber man sieht nachher in der Antriebsberrechnung die Unterschiede der verschiedenen Propeller.
http://www.drivecalc.de/DC34/DCHelp/help_de.html#generate
Ansonsten Propcalc, da hat man dann die Kurven für verschiedene Geschwindigkeiten und Leistungen. Dort kann man schön seine Prioritäten umsetzen (Spitz vs Breitbanding abgestimmt).
Ein Propeller hat ja genauso wie ein Motor nicht einfach nur einen Wirkungsgrad. Das Ziel ist ja das jeweilige eta-max für beides zusammenzuführen, und beim Solarflieger muss das in einem besonders breitem Arbeitbereich erfolgen, hierfür ist Propcalc besonders hilfreich.
Regler-Teillastwirkungsgrad vermesse ich selten auf der Drehmomentkippe (Absolutwert), sondern der Einfachheit halber meist indem ich verschiedene Regler bzw Reglereinstellung (Timing, PWM-Frequenz, u.s.w.) mit dem Arduino in einem Zeitfenster von ca. 2Minuten hochfahre, und stumpf Drehzahl zu Eingangsleistung logge (keine Absolutwerte, nur Differenz). Die Messreihe wird kmpl. zweimal nacheinander durchgefahren um Temperaturfehler ausszuschliesen, da kommt dann z.B. sowas bei raus:
http://www.rc-network.de/forum/showthread.php/697467-Timing?p=4618614&viewfull=1#post4618614
Die Wellen in den Kurven sind wegen der geringen Framerate vom UT2
Edit, habe gestern mal spasseshalber nen Arduinocode für die alten Standard-Atmega8 Regler gebastelt, noch ohne Timing u.s.w., der schwebt dann im Vergleich nochmal zwei Finger breit unter den Kurven
derjuwi
User
Nicht ueberraschend. Die war an Rudi.Julian, ich verstehe die Frage nicht wirklich.
Ich habe Rudi gefragt ob er im Teillastbereich oder mit Vollgas gemessen hat.
Gruesse Julian
derjuwi
User
Und zum bestimmen des Motorwirkungsgrades benutze ich das hier:
https://www.me-systeme.de/shop/de/sensoren/drehmomentsensoren/td/td705
+ passende Analogtechnik.
Das ist ein Drehmomentsensor in 0,1% Genauigkeit. Zusammen mit einer Wirbelstrombremse kann man damit super Motoren bestimmen.
Der ist genau und Aufloesend genug um sogar das Drehmoment durch den Luftwiderstand eines Motors zu messen
Gruesse Julian
https://www.me-systeme.de/shop/de/sensoren/drehmomentsensoren/td/td705
+ passende Analogtechnik.
Das ist ein Drehmomentsensor in 0,1% Genauigkeit. Zusammen mit einer Wirbelstrombremse kann man damit super Motoren bestimmen.
Der ist genau und Aufloesend genug um sogar das Drehmoment durch den Luftwiderstand eines Motors zu messen
Gruesse Julian
derjuwi
User
Julian, ich verstehe die Frage nicht wirklich.
Essentiell zum Propeller-vermessen ist das die exakte Wellenleistung bekannt ist. ,
Dafür nehme ich entweder das Drehmoment mit auf (Motor auf einer Wippe mit zweitem Wägesensor), dann ist es egal ob Teillast oder Vollast, das Unitest liest es über das Kern440 Protokoll mit ein, und zeigt direkt den Motor/Regler Wirkungsgrad und in Folge die Wellenleistung gebrauchsfertig an und loggt es mit. (Unitest2 ist schon was feines
Hmm, waere dann nicht das hier oder sowas perfekt fuer unsere kleinen Leistungen?
https://www.ebay.de/itm/Maxon-DC-Motor-2332-Prazisionsmotor-Swiss-made/323451532086
Ich benutze sowas aehnliches naemlich schon als Bremse an obigem Sensorpruefstand...
Gruesse Julian
Ähnliche Themen
- Antworten
- 0
- Aufrufe
- 2K