Liebe Segelflugfreunde,
Als Einleitung möchte ich erwähnen, dass ich vor Jahrzehnten mit zwei Kanälen (Höhe und Seite) mit Flächenmodellen an Hängen oder auf der Wiese mit Gummiseil unterwegs gewesen bin. E-Motoren und Akkus waren schwer und hatten zu wenig Leistung, Verbrenner waren / sind laut und schmutzig. Vor ca. fünf Jahren bin ich dann erneut in den RC-Flug eingestiegen. Über Radian Pro, EasyGlider Pro und Cularis habe ich mich nun technisch an die Grenze gewagt und bin beim FPV Flug mit Telemetrie und iPad angelangt.
Mein aktuelles Projekt umfasst folgende Basis Hardware Komponenten, die das Modell erst einmal zum Fliegen benötigt:
• MPX Heron Bausatz, Hitec 65 HB und 82 MG Servos, Rockamp 50 A Regler mit SBEC, Motor Torcster Gold A3536/8-1050, nVision 3700 mAh Akku und MPX Empfänger 12 DR Compact
Dazu kommen nun noch die FPV-Module und weitere Sonderausstattung im Modell:
• Security Cam RC123 mit 3,6 mm Linse, Boscam Transmitter, Autopilot FY41 AP light, SM GPS Logger 2, Multiplex LED Set, LC Filter und ein RC Schalter für die FPV Anlage
Und am Boden habe ich folgende Komponenten im Einsatz:
• MPX Royal SX 16 mit eingebautem iMSB Modul, das alle Telemetriedaten per Bluetooth an mein iPAD übertragt und die Fatshark Attitude V3
Das ist natürlich eine ziemlich maximale Ausstattung, die ich über Jahre durch Tests und Erfahrungen stückweise ergänzt habe. Ich erkläre mal die einzelnen Komponenten, dann kann jeder entscheiden, ob er was weglässt oder bei sich ergänzt. Ich habe viel probiert und habe für mich die besten Komponenten gefunden.
Fangen wir beim wichtigsten an, dem Modell. Die Diskussion zum Thema Schaumwaffel lasse ich aus. Aber in dieser Klasse ist der Heron so ziemlich das Beste, was ich bisher gebaut und geflogen habe. Die Servos im Heck verringern das Servospiel fast auf Null. Das T-Leitwerk aber auch das Seitenleitwerk (der untere Teil ist starr) sind gut durchdacht und vermeiden jede Art von Aufbaufehler. Es ist einfach alles perfekt im Lot. Die Flügelbefestigung erschien mir Anfangs etwas zu lasch, aber nach zwei sehr harten Landungen habe ich den Sinn dieser Befestigung erkannt. Die einzige Verbesserung sehe ich in zwei Verstärkungsholmen unter dem Rumpf, links und rechts neben dem Rad. Hier hatte ich nach einer der beiden harten Landungen einen Quer-Riss im Rumpf. Durch das Rad ist hier eine Art Sollbruchstelle vorgegeben. Zwei kleine Längsholme heilen das aber völlig. Die Versteifungen der Klappen mit Stahlstäben ist sehr gut. Das Rad hatte ich als völlige Spielerei eingestuft, aber es ist unglaublich wie oft der Flieger beim Landen im Gras noch lange über das Rad rollt und den Rumpf schont. Insgesamt war ich sehr skeptisch, ob man die Cularis verbessern kann, aber es liegen wirklich viele Jahre Entwicklung und Erfahrung zwischen den Modellen.
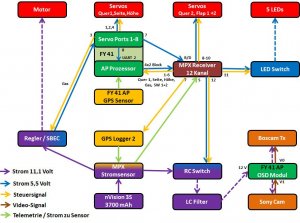
Nun allerdings gibt es ein einziges wichtiges Problem: Der Rumpf ist recht klein für all das Zubehör, das ich reinpacken möchte. Ich musste einige Elemente in die Kabine setzen. Hinten in den Rumpf habe ich auf einem kleinen Brettchen (damit ich alles wieder rausziehen kann) mit Klett den Empfänger, den LED Switch und den Autopilot FY41AP untergebracht. Weiter vorne ist quer der Regler im Rumpf und natürlich der große Akku (3700 mAh) platziert. Auf dem Akku ist noch der MPX Stromsensor befestigt. Den GPS Empfänger für den Autopiloten, den GPS Logger 2, den LC Filter und den Kameraschalter musste ich dann in die Kabine packen. Dazu habe ich hinten in der Kabine einen Kabelbaum durchgeführt, der ca. 10 cm Spiel erlaubt und sich in die Kabine schieben lässt. Dadurch kann ich aber den beiden GPS Empfängern beste und störungsfreie Sicht auf die Satelliten geben.
Den FPV Sender habe ich nach gründlicher Testmessung des Schwerpunkts in das Heck verlegt (s. Foto). Natürlich habe ich alle Kabel (FPV Sender und LEDs) schon beim Zusammenbau vorverlegt. Die Kamera habe ich auf der Kabinenhaube montiert. Die Bohrung durch die Haube sollte mit ganz langsamer Drehzahl und viel Gefühl erfolgen, damit es keine Risse gibt. Eine Haube hatte ich ruiniert. Die Kamera ist mit Heißkleber befestigt. Zacki oder ähnliches macht die Haube spröde und erzeugt Risse. Auf dem Kamerabild sehe ich nur ganz leicht die Schnauze, aber das ist mehr als authentisch.
Nach dem Pflichtteil möchte ich auch noch die besonderen Komponenten beschreiben:
Der GPS Logger 2 von SM Modellbau sendet alle möglichen Telemetrie Daten über das m-Link Protokoll und zeichnet dabei auch noch alles auf einer Speicherkarte auf. Wenn also die Telemetrie nicht alles zurückschickt (weit weg), kann man später immer noch alle Werte in Excel ansehen und auch in Google Earth den Flug nachvollziehen. Das ist ein ziemlich geniales Teil.
Der Autopilot FY41AP light erlaubt zum einen Stabilitätsmodus aber auch zum anderen die wichtige RTL Funktion (Return To Launch). Außerdem ist eine prima OSD Überlagerung für das Kamerabild integriert. Dabei kann die RTL Funktion entweder per Schalter oder auch nach einer vorgegebenen Maximalentfernung ausgelöst werden. Lange Zeit dachte ich, der Autopilot ist recht unflexibel, weil er die Rückkehr nur mit Motor ermöglicht. Aber nach zwei Jahren habe ich erkannt, dass RTL unnötig ist, wenn es relativ windstill ist. Dann kann ich per Telemetrie oder OSD den Flieger immer zurücksteuern. Wenn es stürmischer ist, muss das Modell ständig kämpfen und dabei sind Telemetrie und OSD zu träge. Dann brauche ich sowieso den Motor und nun greift die RTL Funktion perfekt. Ich habe nur ein Querruder über den Autopiloten zu laufen, das reicht völlig und ermöglicht mir den vollen Einsatz der vier Klappen.
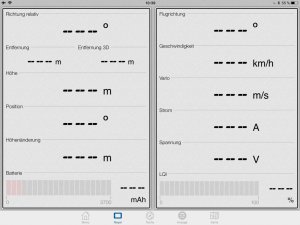
Meine neuste Errungenschaft ist das iMSB Modul aus der Schweiz. Dies habe ich sehr einfach in meine Royal SX einbauen können (es gibt auch andere Varianten für z. B. die neue Cockpit SX oder andere Systeme) und es sendet die Telemetrie Daten per Bluetooth an mein iPAD (oder jedes andere iOS oder Android Device). Und dafür gibt es dann eine tolle Software, die mir alle Daten in fast jeder denkbaren Form anzeigt, Sprachausgabe und -eingabe ermöglicht, Alarme und Schwellenwerte setzen lässt und auch noch den Flug auf einer Karte protokolliert (hier können sogar Flugzonen definiert werden). Das ist die viel bessere Variante, als meine Royal SX mit dem Souffleur oder dem Zusatzdisplay auszurüsten. Ich habe mir auch die neue Cockpit SX 12 angesehen und bin sicher, dass das iMSB Modul weitaus mehr Funktionen anbietet. Zudem ist es äußerst preiswert.
Und damit komme ich zur letzten Komponente, meinem Sender. Es ist die Royal SX 16. Sicherlich nicht die innovativste Fernsteuerung, aber absolut robust und ausgereift. Und man kann wirklich alles damit belegen und programmieren. Ich habe mir auch die beiden Zusatzschalter eingebaut und jeder Taster, Schieber und Schalter hat nun eine Funktion. Seitdem ich das iMSB Modul habe, nutze ich 14 der 16 Kanäle. 12 davon gehen zum Empfänger (die üblichen sieben: Motor, Höhe, Seite, 4 Klappen und dazu kommen noch zwei für den Autopiloten, je ein LED- und ein Kameraschalter sowie ein Kanal für die Anzeige des Maximalwerte des GPS Loggers. Zwei weitere Kanäle habe ich auf die Taster gelegt, um mir über das iMSB Modul von meinem iPad die Batteriekapazität bzw. Höhe und Entfernung ansagen zu lassen.
So, das war mein Bericht zum Heron. Habt einen guten Flug und denkt an den Kenntnisnachweis und die Plakette. Wir haben den Modellflug Dank der Initiativen der Verbände und dem Einsatz einzelner intelligenter Politiker (Dank an Sören Bartol) gerettet. Nun sollten wir auch die Spielregeln beachten.
Christian
Als Einleitung möchte ich erwähnen, dass ich vor Jahrzehnten mit zwei Kanälen (Höhe und Seite) mit Flächenmodellen an Hängen oder auf der Wiese mit Gummiseil unterwegs gewesen bin. E-Motoren und Akkus waren schwer und hatten zu wenig Leistung, Verbrenner waren / sind laut und schmutzig. Vor ca. fünf Jahren bin ich dann erneut in den RC-Flug eingestiegen. Über Radian Pro, EasyGlider Pro und Cularis habe ich mich nun technisch an die Grenze gewagt und bin beim FPV Flug mit Telemetrie und iPad angelangt.
Mein aktuelles Projekt umfasst folgende Basis Hardware Komponenten, die das Modell erst einmal zum Fliegen benötigt:
• MPX Heron Bausatz, Hitec 65 HB und 82 MG Servos, Rockamp 50 A Regler mit SBEC, Motor Torcster Gold A3536/8-1050, nVision 3700 mAh Akku und MPX Empfänger 12 DR Compact
Dazu kommen nun noch die FPV-Module und weitere Sonderausstattung im Modell:
• Security Cam RC123 mit 3,6 mm Linse, Boscam Transmitter, Autopilot FY41 AP light, SM GPS Logger 2, Multiplex LED Set, LC Filter und ein RC Schalter für die FPV Anlage
Und am Boden habe ich folgende Komponenten im Einsatz:
• MPX Royal SX 16 mit eingebautem iMSB Modul, das alle Telemetriedaten per Bluetooth an mein iPAD übertragt und die Fatshark Attitude V3
Das ist natürlich eine ziemlich maximale Ausstattung, die ich über Jahre durch Tests und Erfahrungen stückweise ergänzt habe. Ich erkläre mal die einzelnen Komponenten, dann kann jeder entscheiden, ob er was weglässt oder bei sich ergänzt. Ich habe viel probiert und habe für mich die besten Komponenten gefunden.
Fangen wir beim wichtigsten an, dem Modell. Die Diskussion zum Thema Schaumwaffel lasse ich aus. Aber in dieser Klasse ist der Heron so ziemlich das Beste, was ich bisher gebaut und geflogen habe. Die Servos im Heck verringern das Servospiel fast auf Null. Das T-Leitwerk aber auch das Seitenleitwerk (der untere Teil ist starr) sind gut durchdacht und vermeiden jede Art von Aufbaufehler. Es ist einfach alles perfekt im Lot. Die Flügelbefestigung erschien mir Anfangs etwas zu lasch, aber nach zwei sehr harten Landungen habe ich den Sinn dieser Befestigung erkannt. Die einzige Verbesserung sehe ich in zwei Verstärkungsholmen unter dem Rumpf, links und rechts neben dem Rad. Hier hatte ich nach einer der beiden harten Landungen einen Quer-Riss im Rumpf. Durch das Rad ist hier eine Art Sollbruchstelle vorgegeben. Zwei kleine Längsholme heilen das aber völlig. Die Versteifungen der Klappen mit Stahlstäben ist sehr gut. Das Rad hatte ich als völlige Spielerei eingestuft, aber es ist unglaublich wie oft der Flieger beim Landen im Gras noch lange über das Rad rollt und den Rumpf schont. Insgesamt war ich sehr skeptisch, ob man die Cularis verbessern kann, aber es liegen wirklich viele Jahre Entwicklung und Erfahrung zwischen den Modellen.
Nun allerdings gibt es ein einziges wichtiges Problem: Der Rumpf ist recht klein für all das Zubehör, das ich reinpacken möchte. Ich musste einige Elemente in die Kabine setzen. Hinten in den Rumpf habe ich auf einem kleinen Brettchen (damit ich alles wieder rausziehen kann) mit Klett den Empfänger, den LED Switch und den Autopilot FY41AP untergebracht. Weiter vorne ist quer der Regler im Rumpf und natürlich der große Akku (3700 mAh) platziert. Auf dem Akku ist noch der MPX Stromsensor befestigt. Den GPS Empfänger für den Autopiloten, den GPS Logger 2, den LC Filter und den Kameraschalter musste ich dann in die Kabine packen. Dazu habe ich hinten in der Kabine einen Kabelbaum durchgeführt, der ca. 10 cm Spiel erlaubt und sich in die Kabine schieben lässt. Dadurch kann ich aber den beiden GPS Empfängern beste und störungsfreie Sicht auf die Satelliten geben.
Den FPV Sender habe ich nach gründlicher Testmessung des Schwerpunkts in das Heck verlegt (s. Foto). Natürlich habe ich alle Kabel (FPV Sender und LEDs) schon beim Zusammenbau vorverlegt. Die Kamera habe ich auf der Kabinenhaube montiert. Die Bohrung durch die Haube sollte mit ganz langsamer Drehzahl und viel Gefühl erfolgen, damit es keine Risse gibt. Eine Haube hatte ich ruiniert. Die Kamera ist mit Heißkleber befestigt. Zacki oder ähnliches macht die Haube spröde und erzeugt Risse. Auf dem Kamerabild sehe ich nur ganz leicht die Schnauze, aber das ist mehr als authentisch.
Nach dem Pflichtteil möchte ich auch noch die besonderen Komponenten beschreiben:
Der GPS Logger 2 von SM Modellbau sendet alle möglichen Telemetrie Daten über das m-Link Protokoll und zeichnet dabei auch noch alles auf einer Speicherkarte auf. Wenn also die Telemetrie nicht alles zurückschickt (weit weg), kann man später immer noch alle Werte in Excel ansehen und auch in Google Earth den Flug nachvollziehen. Das ist ein ziemlich geniales Teil.
Der Autopilot FY41AP light erlaubt zum einen Stabilitätsmodus aber auch zum anderen die wichtige RTL Funktion (Return To Launch). Außerdem ist eine prima OSD Überlagerung für das Kamerabild integriert. Dabei kann die RTL Funktion entweder per Schalter oder auch nach einer vorgegebenen Maximalentfernung ausgelöst werden. Lange Zeit dachte ich, der Autopilot ist recht unflexibel, weil er die Rückkehr nur mit Motor ermöglicht. Aber nach zwei Jahren habe ich erkannt, dass RTL unnötig ist, wenn es relativ windstill ist. Dann kann ich per Telemetrie oder OSD den Flieger immer zurücksteuern. Wenn es stürmischer ist, muss das Modell ständig kämpfen und dabei sind Telemetrie und OSD zu träge. Dann brauche ich sowieso den Motor und nun greift die RTL Funktion perfekt. Ich habe nur ein Querruder über den Autopiloten zu laufen, das reicht völlig und ermöglicht mir den vollen Einsatz der vier Klappen.
Meine neuste Errungenschaft ist das iMSB Modul aus der Schweiz. Dies habe ich sehr einfach in meine Royal SX einbauen können (es gibt auch andere Varianten für z. B. die neue Cockpit SX oder andere Systeme) und es sendet die Telemetrie Daten per Bluetooth an mein iPAD (oder jedes andere iOS oder Android Device). Und dafür gibt es dann eine tolle Software, die mir alle Daten in fast jeder denkbaren Form anzeigt, Sprachausgabe und -eingabe ermöglicht, Alarme und Schwellenwerte setzen lässt und auch noch den Flug auf einer Karte protokolliert (hier können sogar Flugzonen definiert werden). Das ist die viel bessere Variante, als meine Royal SX mit dem Souffleur oder dem Zusatzdisplay auszurüsten. Ich habe mir auch die neue Cockpit SX 12 angesehen und bin sicher, dass das iMSB Modul weitaus mehr Funktionen anbietet. Zudem ist es äußerst preiswert.
Und damit komme ich zur letzten Komponente, meinem Sender. Es ist die Royal SX 16. Sicherlich nicht die innovativste Fernsteuerung, aber absolut robust und ausgereift. Und man kann wirklich alles damit belegen und programmieren. Ich habe mir auch die beiden Zusatzschalter eingebaut und jeder Taster, Schieber und Schalter hat nun eine Funktion. Seitdem ich das iMSB Modul habe, nutze ich 14 der 16 Kanäle. 12 davon gehen zum Empfänger (die üblichen sieben: Motor, Höhe, Seite, 4 Klappen und dazu kommen noch zwei für den Autopiloten, je ein LED- und ein Kameraschalter sowie ein Kanal für die Anzeige des Maximalwerte des GPS Loggers. Zwei weitere Kanäle habe ich auf die Taster gelegt, um mir über das iMSB Modul von meinem iPad die Batteriekapazität bzw. Höhe und Entfernung ansagen zu lassen.
So, das war mein Bericht zum Heron. Habt einen guten Flug und denkt an den Kenntnisnachweis und die Plakette. Wir haben den Modellflug Dank der Initiativen der Verbände und dem Einsatz einzelner intelligenter Politiker (Dank an Sören Bartol) gerettet. Nun sollten wir auch die Spielregeln beachten.
Christian