Hallo,
ich habe heute den Nachmittag verzweifelt versucht, den REX 6A in meinem Shark einzustellen, es ist mir aber nicht gelungen.
Kurz die Konfiguration:
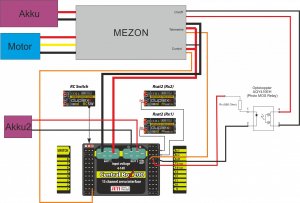
CB 200 mit 15 Servos angeschlossen und RC-Switch
RX Eingang 1 wird von einem RSAT2 über EX-Bus bewerkstelligt
RX Eingang 2 wird mit dem REX6A erledigt der an dessen E1 (auf EX-Bus eingestellt) angeschlossen ist. An E2 hängt auch via EX-Bus ein LinkVarioPro
Der REX 6A liegt flach auf dem Rumpfboden (Antenne nach hinten). Modell auf dem Ständer absolut ruhig.
Über den Einstellassistent wurde alles soweit eingestellt (Einbaulage, kein EX-Signal bei Faissafe etc.).
Wenn ich nun einschalte kommt nach einiger Zeit "Ruhig halten" da offensichtlich was beim Initialisieren nicht klappt. Ein "scharfgeschaltet" (oder was die Tante in dem Fall von sich gibt) kommt aber nie, obwohl die Einbaulage korrekt eingestellt wurde und das Modell absolut gerade und ruhig auf dem Ständer liegt.
Wechsle ich dann auf die Einstellungen, sehe ich "Empfängerausgänge deaktiviert" im Status.
Ich habe schon mehrfach auf Werkseinstellungen zurückgesetzt und die Prozedur wiederholt und es auch als Standalone-Empfänger in einem neu angelegten Modell probiert.
Zudem ist die Übertragung der LinkVario-Daten auch irgendwie superlangsam. Selbst nach 10 Minuten Betrieb sind noch nicht alle Sensoren übertragen (z.B. Vario und Höhe fehlen). OK es sind um die 40 aber das ist bei der 24er kein Problem (die 16er kann ja nur 32 Sensorwerte).
Bei allen Komponenten sind die jeweils aktuellen Firmwarestände drauf und auch die Device-Dateien im Sender sind aktuell.
Mach ich da noch was falsch oder ist der neue REX6A ein Fall für den Hacker-Service? Ich bin eigentlich was Jeti betrifft sehr bewandert. Aber hier stehe ich auf dem Schlauch.
Ein Rex12A in meiner FunCubXL funzt seit Monaten einwandfrei. Der hat aber noch die alte Firmware drauf.
Gruß
Onki
ich habe heute den Nachmittag verzweifelt versucht, den REX 6A in meinem Shark einzustellen, es ist mir aber nicht gelungen.
Kurz die Konfiguration:
CB 200 mit 15 Servos angeschlossen und RC-Switch
RX Eingang 1 wird von einem RSAT2 über EX-Bus bewerkstelligt
RX Eingang 2 wird mit dem REX6A erledigt der an dessen E1 (auf EX-Bus eingestellt) angeschlossen ist. An E2 hängt auch via EX-Bus ein LinkVarioPro
Der REX 6A liegt flach auf dem Rumpfboden (Antenne nach hinten). Modell auf dem Ständer absolut ruhig.
Über den Einstellassistent wurde alles soweit eingestellt (Einbaulage, kein EX-Signal bei Faissafe etc.).
Wenn ich nun einschalte kommt nach einiger Zeit "Ruhig halten" da offensichtlich was beim Initialisieren nicht klappt. Ein "scharfgeschaltet" (oder was die Tante in dem Fall von sich gibt) kommt aber nie, obwohl die Einbaulage korrekt eingestellt wurde und das Modell absolut gerade und ruhig auf dem Ständer liegt.
Wechsle ich dann auf die Einstellungen, sehe ich "Empfängerausgänge deaktiviert" im Status.
Ich habe schon mehrfach auf Werkseinstellungen zurückgesetzt und die Prozedur wiederholt und es auch als Standalone-Empfänger in einem neu angelegten Modell probiert.
Zudem ist die Übertragung der LinkVario-Daten auch irgendwie superlangsam. Selbst nach 10 Minuten Betrieb sind noch nicht alle Sensoren übertragen (z.B. Vario und Höhe fehlen). OK es sind um die 40 aber das ist bei der 24er kein Problem (die 16er kann ja nur 32 Sensorwerte).
Bei allen Komponenten sind die jeweils aktuellen Firmwarestände drauf und auch die Device-Dateien im Sender sind aktuell.
Mach ich da noch was falsch oder ist der neue REX6A ein Fall für den Hacker-Service? Ich bin eigentlich was Jeti betrifft sehr bewandert. Aber hier stehe ich auf dem Schlauch.
Ein Rex12A in meiner FunCubXL funzt seit Monaten einwandfrei. Der hat aber noch die alte Firmware drauf.
Gruß
Onki
") .
.