GePo
User
Hallo Modellbaukollegen,
nachdem sich in den letzten Jahren sehr viel in Richtung autonomes Fliegen von "Drohnen" und ähnlichem getan hat … warum nicht wieder mal neue Wege bestreiten?")
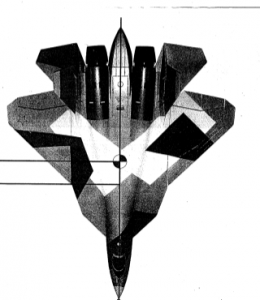
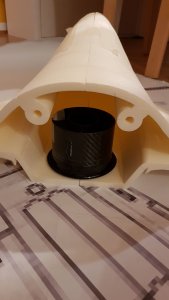
Mir schwebt in Gedanken schon lange eine SU-57 mit 2x 120er Impellern vor, die senkrecht starten und landen kann.
Nachbauen was es schon gibt, ist ok und kann auch sehr detailreich ausfallen. Im Modellbau kann man aber ja auch Sachen versuchen, die es so noch nicht gibt - also warum nicht eine schwebende Su57 mit ca 2,2m Länge, ca 1,5m Spw und ca 10 Kg Startgewicht
2018 gab es einen Wettbewerb bei dem auch eine schwebende Su-47 vorkam. Hat dazu vielleicht jemand genauere Infos? Eigene Bilder, Videos oder Insiderinfos ?
Infos, Anregungen und jegliche Hilfe bei der nötigen Steuerelektronik sind hier willkommen!
Gruß, Georg
(Analog-Modellbauer = nix 3D Druck = Nix CAD = nix Fräse :rolleyes:") nur Hände und Hirn )
nur Hände und Hirn )
nachdem sich in den letzten Jahren sehr viel in Richtung autonomes Fliegen von "Drohnen" und ähnlichem getan hat … warum nicht wieder mal neue Wege bestreiten?
Mir schwebt in Gedanken schon lange eine SU-57 mit 2x 120er Impellern vor, die senkrecht starten und landen kann.
Nachbauen was es schon gibt, ist ok und kann auch sehr detailreich ausfallen. Im Modellbau kann man aber ja auch Sachen versuchen, die es so noch nicht gibt - also warum nicht eine schwebende Su57 mit ca 2,2m Länge, ca 1,5m Spw und ca 10 Kg Startgewicht
2018 gab es einen Wettbewerb bei dem auch eine schwebende Su-47 vorkam. Hat dazu vielleicht jemand genauere Infos? Eigene Bilder, Videos oder Insiderinfos ?
Infos, Anregungen und jegliche Hilfe bei der nötigen Steuerelektronik sind hier willkommen!
Gruß, Georg
(Analog-Modellbauer = nix 3D Druck = Nix CAD = nix Fräse
nur Hände und Hirn )









 !
!