Du verwendest einen veralteten Browser. Es ist möglich, dass diese oder andere Websites nicht korrekt angezeigt werden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
95“ MX2 AeroFun - auf dem Weg zum effizientesten 3D Elektro Kunstflieger?
- Ersteller Tobias48
- Erstellt am
-
- Schlagworte
- elektro kunstflieger mx2

Hey Danke 
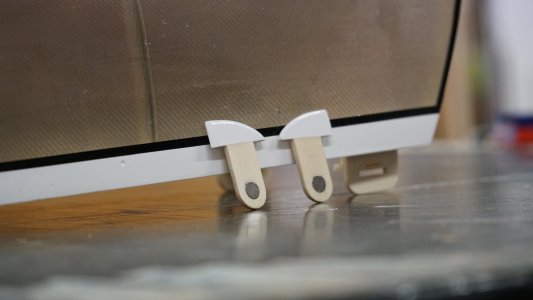
Die Fläche wird auf mehrere Arten befestigt und die Kraft in die Zelle eingeleitet. Erstmal stützen sich die Wurzelrippen an deren Gegenstück am Rumpf rechts und links ab. Außerdem gibt es im Rumpf einen Spant mit horizontalen Auflageflächen, auf welcher sich der Holm nach oben und unten abstützen kann.
Die Flächenverriegelung selbst erfolgt dann auf zwei Arten. Die Scherkräfte werden über vier Kohlerohre aufgenommen, welche durch Löcher in der Tragfläche und im Rumpf geschoben werden. Diese werden im Betrieb durch Magneten an Ort und Stelle gehalten. Zusätzlich wird der Holm noch zwischen seinen beiden Auflageflächen mit Klettkabelbindern festgezurrt. Letzteres hatte ich zuerst nicht eingeplant gehabt, doch es gibt dem ganzen nochmal zusätzlich Stabilität.
Die Fläche wird auf mehrere Arten befestigt und die Kraft in die Zelle eingeleitet. Erstmal stützen sich die Wurzelrippen an deren Gegenstück am Rumpf rechts und links ab. Außerdem gibt es im Rumpf einen Spant mit horizontalen Auflageflächen, auf welcher sich der Holm nach oben und unten abstützen kann.
Die Flächenverriegelung selbst erfolgt dann auf zwei Arten. Die Scherkräfte werden über vier Kohlerohre aufgenommen, welche durch Löcher in der Tragfläche und im Rumpf geschoben werden. Diese werden im Betrieb durch Magneten an Ort und Stelle gehalten. Zusätzlich wird der Holm noch zwischen seinen beiden Auflageflächen mit Klettkabelbindern festgezurrt. Letzteres hatte ich zuerst nicht eingeplant gehabt, doch es gibt dem ganzen nochmal zusätzlich Stabilität.
Anhänge

Es gibt mal wieder etwas zu berichten. Ich habe mir den Effizienzunterschied von meinem EZFW mal genauer angeschaut.
In meinen größeren Elektrofliegern habe ich immer einen MPX Datenlogger eingebaut, um alle Telemetriedaten auswerten zu können. Hauptsächlich wegen dem Antriebsstrang für Strom, Spannung, Drehzahl und co. Dieser ist aber auch für andere Sachen sehr hilfreich.
Mein YGE Regler bietet den Vorteil, dass ich den Vollgasstrom aktiv begrenzen kann. Im Normalfall benutze ich diese Funktion, um die Stromspitzen im Betrieb rauszunehmen/abzupuffern. Das schont den ganzen Antriebsstrang, da die Stromspitzen keinen Performancevorteil bieten. Im Fall meiner MX2 habe ich am Boden normalerweise einen Vollgasstrom von ca. 130-135A und habe daher dem Strom aktiv auf 135A begrenzt.
Für den Effizienzvergleich bin ich folgendermaßen Vorgegangen. Ich habe zuerst im Flug geschaut wie viel Strom ich brauche wenn ich im Geradeausflug bei einer mittleren Fluggeschwindigkeit unterwegs bin. Das waren 20A. Für den nächsten Flug habe ich dann den Strom aktiv auf 20A begrenzt und noch einen GPS Geschwindigkeitsmesser per Telemetrie mitlaufen lassen. Dann bin ich bei uns am Flugplatz mit Vollgas (20A) Bahnen geflogen. Eine Runde Fahrwerk raus, dann zwei Runden Fahrwerk rein und dann wieder eine Runde Fahrwerk raus (um die sinkende Akkuspannung bei den Logs auszugleichen).
Ergebnisse zusammengefasst, mit Fahrwerk raus war es eine Durchschnittgeschwindigkeit von 91,4km/h und mit eingezogenem Fahrwerk von 103,2km/h. Im Cw-Wert bedeutet dies einen Effizienzvorteil von 22%, mein Plan mit dem EZFW ist also voll aufgegangen
In meinen größeren Elektrofliegern habe ich immer einen MPX Datenlogger eingebaut, um alle Telemetriedaten auswerten zu können. Hauptsächlich wegen dem Antriebsstrang für Strom, Spannung, Drehzahl und co. Dieser ist aber auch für andere Sachen sehr hilfreich.
Mein YGE Regler bietet den Vorteil, dass ich den Vollgasstrom aktiv begrenzen kann. Im Normalfall benutze ich diese Funktion, um die Stromspitzen im Betrieb rauszunehmen/abzupuffern. Das schont den ganzen Antriebsstrang, da die Stromspitzen keinen Performancevorteil bieten. Im Fall meiner MX2 habe ich am Boden normalerweise einen Vollgasstrom von ca. 130-135A und habe daher dem Strom aktiv auf 135A begrenzt.
Für den Effizienzvergleich bin ich folgendermaßen Vorgegangen. Ich habe zuerst im Flug geschaut wie viel Strom ich brauche wenn ich im Geradeausflug bei einer mittleren Fluggeschwindigkeit unterwegs bin. Das waren 20A. Für den nächsten Flug habe ich dann den Strom aktiv auf 20A begrenzt und noch einen GPS Geschwindigkeitsmesser per Telemetrie mitlaufen lassen. Dann bin ich bei uns am Flugplatz mit Vollgas (20A) Bahnen geflogen. Eine Runde Fahrwerk raus, dann zwei Runden Fahrwerk rein und dann wieder eine Runde Fahrwerk raus (um die sinkende Akkuspannung bei den Logs auszugleichen).
Ergebnisse zusammengefasst, mit Fahrwerk raus war es eine Durchschnittgeschwindigkeit von 91,4km/h und mit eingezogenem Fahrwerk von 103,2km/h. Im Cw-Wert bedeutet dies einen Effizienzvorteil von 22%, mein Plan mit dem EZFW ist also voll aufgegangen

")
Ich bin echt am überlegen ob ich demnächst noch ein normales Fahrwerk mit Radschuhen auf super aerodynamisch baue. Allerdings müsste ich dann zuerst noch Formen für die Radschuhe und den Fahrwerksbügel machen.
Jup, das Pendelhöhenruder wirkt echt wie Sau
Von meiner Bauweise aus wären ca. 70° Ausschlag locker drin, für die ersten Flüge hatte ich den Ausschlag allerdings auf ca. 55° reduziert gehabt. Dieser Ausschlag wirkt schon brutal und ich komm vom Fluggefühl her super damit klar, daher hab ich es erstmal so gelassen.
Jup, das Pendelhöhenruder wirkt echt wie Sau
Von meiner Bauweise aus wären ca. 70° Ausschlag locker drin, für die ersten Flüge hatte ich den Ausschlag allerdings auf ca. 55° reduziert gehabt. Dieser Ausschlag wirkt schon brutal und ich komm vom Fluggefühl her super damit klar, daher hab ich es erstmal so gelassen.
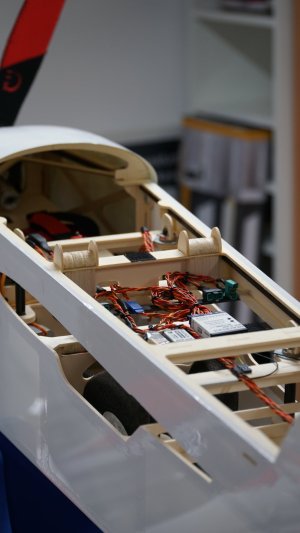
Hier gibts nochmal ein paar mehr Detailfotos 
Anhänge
-
 DSC04801.JPG98,6 KB · Aufrufe: 210
DSC04801.JPG98,6 KB · Aufrufe: 210 -
 DSC04784.JPG98,4 KB · Aufrufe: 203
DSC04784.JPG98,4 KB · Aufrufe: 203 -
 DSC04798.JPG95,4 KB · Aufrufe: 193
DSC04798.JPG95,4 KB · Aufrufe: 193 -
 DSC04793.JPG96,8 KB · Aufrufe: 199
DSC04793.JPG96,8 KB · Aufrufe: 199 -
 DSC04791.JPG191,2 KB · Aufrufe: 204
DSC04791.JPG191,2 KB · Aufrufe: 204 -
 DSC04789.JPG169 KB · Aufrufe: 206
DSC04789.JPG169 KB · Aufrufe: 206 -
 DSC04788.JPG176,4 KB · Aufrufe: 198
DSC04788.JPG176,4 KB · Aufrufe: 198 -
 DSC04786.JPG147,7 KB · Aufrufe: 198
DSC04786.JPG147,7 KB · Aufrufe: 198 -
 DSC04782.JPG177,5 KB · Aufrufe: 207
DSC04782.JPG177,5 KB · Aufrufe: 207 -
 DSC04781.JPG102,8 KB · Aufrufe: 202
DSC04781.JPG102,8 KB · Aufrufe: 202 -
 DSC04778.JPG87,6 KB · Aufrufe: 236
DSC04778.JPG87,6 KB · Aufrufe: 236 -
 DSC04762.JPG203,1 KB · Aufrufe: 236
DSC04762.JPG203,1 KB · Aufrufe: 236 -
 DSC04739.JPG209,6 KB · Aufrufe: 244
DSC04739.JPG209,6 KB · Aufrufe: 244 -
 DSC04725.JPG117,6 KB · Aufrufe: 209
DSC04725.JPG117,6 KB · Aufrufe: 209
Saucooles Projekt mit echt guten Detaillösungen.
Mich erinnert es etwas an die 3DHS Extra 95, die ähnlich ist in den Gewichten und quf Elektro ausgelegt ist Allerdings einen dicken Flügel hat.
Ich bin viele 91er geflogen, auch mit Getriebe. Die 25x12 fand ich mit dem StinGR etwas gross, fur mich der beste Prop in der Grösse ist der PT24x12 aber bei höheren Drehzahlen. Kannst Du was sagen zum Drehmoment der 28x13?
Auch spannend für mich - ich fliege auch YGE (320, 185 und den neuen 255). Ich begrenze den Strom nie bzw auf ca 350;(320er), 280 (255er).Einfach weil eine möglichst gute Beschleunigungsphase möchte. Ausserdem stelle ich mir den Limiter als Fehlerquelle vor. Da Du nun bewiesen hast, dass es geht, kann ich auch mal in diese Richtung experimentieren.
Das Eansys habe ich nun auch (ebenfalls mit CFK Platte) und werde bald mal testen gegenüber dem StinGR.
Mich erinnert es etwas an die 3DHS Extra 95, die ähnlich ist in den Gewichten und quf Elektro ausgelegt ist Allerdings einen dicken Flügel hat.
Ich bin viele 91er geflogen, auch mit Getriebe. Die 25x12 fand ich mit dem StinGR etwas gross, fur mich der beste Prop in der Grösse ist der PT24x12 aber bei höheren Drehzahlen. Kannst Du was sagen zum Drehmoment der 28x13?
Auch spannend für mich - ich fliege auch YGE (320, 185 und den neuen 255). Ich begrenze den Strom nie bzw auf ca 350;(320er), 280 (255er).Einfach weil eine möglichst gute Beschleunigungsphase möchte. Ausserdem stelle ich mir den Limiter als Fehlerquelle vor. Da Du nun bewiesen hast, dass es geht, kann ich auch mal in diese Richtung experimentieren.
Das Eansys habe ich nun auch (ebenfalls mit CFK Platte) und werde bald mal testen gegenüber dem StinGR.
Echt cooles Projekt und raz faz erledigt! Gratuliere! 
An diese Mickey Mouse Räder könnte ich mich nicht gewöhnen. Der Flieger steht ja auch mal am Boden in Pausen. Da möchte man die Erscheinung auch genießen. Daher finde ich die Überlegung zu aerodynamischen Bügel und Radverkleidungen, vielleicht im Renospeeder Design, oder Challenger II/III, ganz passend.
Grüße, Bernd
An diese Mickey Mouse Räder könnte ich mich nicht gewöhnen. Der Flieger steht ja auch mal am Boden in Pausen. Da möchte man die Erscheinung auch genießen. Daher finde ich die Überlegung zu aerodynamischen Bügel und Radverkleidungen, vielleicht im Renospeeder Design, oder Challenger II/III, ganz passend.
Grüße, Bernd
Danke euch allen
Leelander, Drehmoment ist bei der 28x13 schon vorhanden Ich habe es aber bisher nur beim Rückenharrier gemerkt, da möchte die MX2 in eine Richtung einfach nicht so eng rum. Das ist aber noch in einem Bereich wo es für mich noch gut auszusteuern ist. Ansonsten ist es mir nicht aufgefallen.
Ich habe es aber bisher nur beim Rückenharrier gemerkt, da möchte die MX2 in eine Richtung einfach nicht so eng rum. Das ist aber noch in einem Bereich wo es für mich noch gut auszusteuern ist. Ansonsten ist es mir nicht aufgefallen.
Inwiefern meinst du dass der Limiter eine Fehlerquelle ist? In Punkto Beschleunigung habe ich mit und ohne Limiter keinen Unterschied gemerkt, das bei 0,7s Beschleunigung.
Bernd, die Räder sind da nicht das Problem. Ich würde sagen das schmale und eher flache Fahrwerk macht den Großteil aus, warum es etwas komisch aussieht. Die größeren Räder hatten bei mir zwei Gründe. Sie sind super leicht mit um die 30g pro Rad und durch die Größe werden meine EZFW Mechaniken geschont. Wenn ich Zeit und Lust habe setze ich mich mal an ein normales Fahrwerk dran um einen Vergleich zu haben.
Leelander, Drehmoment ist bei der 28x13 schon vorhanden
Ich habe es aber bisher nur beim Rückenharrier gemerkt, da möchte die MX2 in eine Richtung einfach nicht so eng rum. Das ist aber noch in einem Bereich wo es für mich noch gut auszusteuern ist. Ansonsten ist es mir nicht aufgefallen.Inwiefern meinst du dass der Limiter eine Fehlerquelle ist? In Punkto Beschleunigung habe ich mit und ohne Limiter keinen Unterschied gemerkt, das bei 0,7s Beschleunigung.
Bernd, die Räder sind da nicht das Problem. Ich würde sagen das schmale und eher flache Fahrwerk macht den Großteil aus, warum es etwas komisch aussieht. Die größeren Räder hatten bei mir zwei Gründe. Sie sind super leicht mit um die 30g pro Rad und durch die Größe werden meine EZFW Mechaniken geschont. Wenn ich Zeit und Lust habe setze ich mich mal an ein normales Fahrwerk dran um einen Vergleich zu haben.
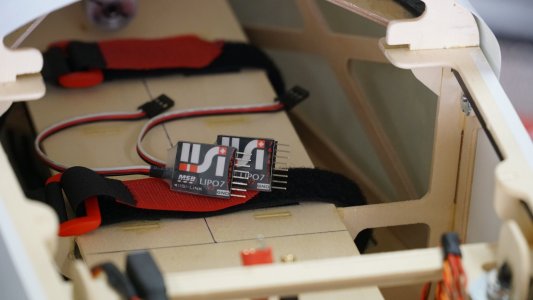
Nochmal ein kleines offtopic Thema. Im Zuge des MX2 Projektes hatte ich mir auch neue Akkus gekauft. Die 7s 5200er hat Mylipo normalerweise nicht im Programm, diesen konnten sie mir aber in kürzester Zeit bauen. Dadurch hatte ich auch mal etwas länger mit Mylipo gequatscht und ein paar neuen Erkenntnisse für mich in Punkto entladen von Lipos mitgenommen. Akkus in dieser Größenordnung sind nicht gerade günstig und ich möchte das diese so lange wie möglich halten. Es kann sein, dass das folgende für euch schon bekannt ist, ich schreib es aber trotzdem mal.
Bisher hatte ich es beim Fliegen immer so gemacht, dass ich mir per Telemetrie einen Alarm gesetzt habe, wenn eine bestimmte Anzahl an mah verbraucht wurde. Danach bin ich dann gelandet. Dieses Vorgehen ist bei neuen Akkus auch vollkommen legitim. Das Problem tritt erst dann auf, wenn die Akkus älter werden. Im laufe der Zeit sinkt ihre Spannungslage, also die Spannung bricht unter Last stärker ein. Bei Lipos gibt es eine kritische Spannung, diese liegt bei 3V pro Zelle. Wenn eine Zelle somit im Betrieb unter die 3V fällt, wird diese dauerhaft beschädigt. In der Realität sind es eher 3,3V, da diese Spannungen unter Last nur weniger mah voneinander trennen. Das angesprochene Problem ist somit folgendes. Wenn ein Akku etwas älter ist, kann es passieren, dass z.B. erst 60% der mah entladen sind und trotzdem eine Zelle unter Last unter 3V fällt. Aus diesem Grund macht es sogar mehr Sinn die Akkuspannung als „Tankuhr“ zu verwenden, anstatt die verbrauchten mah.
Ich habe mich für einen Zwischenweg aus den beiden Lösungen entschieden. Es war nicht gerade leicht für die Telemetrie eine Einzelspannungsmessung für 2x 7s zu finden. Am Ende bin ich bei IISI-RC fündig geworden. Diese bieten für MPX und ihre hauseigene Telemetrie einen Sensor für bis zu 7s an, welchen man auch für 2x 7s parallelschalten kann. Dort habe ich dann den Alarm auf 3,4V pro Zelle eingestellt. Wenn man keine Einzelspannungsmessung hat, sondern nur die Gesamtspannung, sollte diese Alarmschwelle bei 3,5V pro Zelle liegen. Die Akkuzellen altern nicht alle gleich und man muss ja immer die schwächste Zelle berücksichtigen. Zusätzlich habe ich noch einen mah Alarm programmiert, welcher bei 80% Minus 200mah (für den Landeanflug) liegt.
Bisher hat bei mir immer der mah Alarm zuerst ausgelöst, da meine Akkus ja auch noch super neu sind und pro Pack erst ca. 15 Zyklen haben. Mal schauen nach wie vielen Zyklen sich das in Zukunft ändern wird.
Bisher hatte ich es beim Fliegen immer so gemacht, dass ich mir per Telemetrie einen Alarm gesetzt habe, wenn eine bestimmte Anzahl an mah verbraucht wurde. Danach bin ich dann gelandet. Dieses Vorgehen ist bei neuen Akkus auch vollkommen legitim. Das Problem tritt erst dann auf, wenn die Akkus älter werden. Im laufe der Zeit sinkt ihre Spannungslage, also die Spannung bricht unter Last stärker ein. Bei Lipos gibt es eine kritische Spannung, diese liegt bei 3V pro Zelle. Wenn eine Zelle somit im Betrieb unter die 3V fällt, wird diese dauerhaft beschädigt. In der Realität sind es eher 3,3V, da diese Spannungen unter Last nur weniger mah voneinander trennen. Das angesprochene Problem ist somit folgendes. Wenn ein Akku etwas älter ist, kann es passieren, dass z.B. erst 60% der mah entladen sind und trotzdem eine Zelle unter Last unter 3V fällt. Aus diesem Grund macht es sogar mehr Sinn die Akkuspannung als „Tankuhr“ zu verwenden, anstatt die verbrauchten mah.
Ich habe mich für einen Zwischenweg aus den beiden Lösungen entschieden. Es war nicht gerade leicht für die Telemetrie eine Einzelspannungsmessung für 2x 7s zu finden. Am Ende bin ich bei IISI-RC fündig geworden. Diese bieten für MPX und ihre hauseigene Telemetrie einen Sensor für bis zu 7s an, welchen man auch für 2x 7s parallelschalten kann. Dort habe ich dann den Alarm auf 3,4V pro Zelle eingestellt. Wenn man keine Einzelspannungsmessung hat, sondern nur die Gesamtspannung, sollte diese Alarmschwelle bei 3,5V pro Zelle liegen. Die Akkuzellen altern nicht alle gleich und man muss ja immer die schwächste Zelle berücksichtigen. Zusätzlich habe ich noch einen mah Alarm programmiert, welcher bei 80% Minus 200mah (für den Landeanflug) liegt.
Bisher hat bei mir immer der mah Alarm zuerst ausgelöst, da meine Akkus ja auch noch super neu sind und pro Pack erst ca. 15 Zyklen haben. Mal schauen nach wie vielen Zyklen sich das in Zukunft ändern wird.
Anhänge

Hallo Tobias
Erstmals, super cooles Projekt. Es macht Spass, aussergewöhnliche Lösungen und Konstruktionen für einen grossen Kunstflugmodell zu sehen! Bitte mehr berichten, es hilft uns inspiriert sicher vielen von uns!
Bettreffend dein Offtopic Thema kann ich deine Lösung 100% empfehlen.
Ok, muss ich es sagen, ich kenne den IISI-Gründer seit 15 Jahren und bin mit den allerersten Prototypen geflogen.
Das gesagt, ich muss auch sagen: ein 2m30 Maschine fliege ich nicht mehr ohne IISI-Telemetrie. Wenn den Cockpit mal leer ist oder etwas schief läuft, fliege ich einfach nicht. Warum? Weil ich einmal vor 10 Jahren, einen Alarm ignorieret habe... und den Flugzeug gecrasht habe.
Als Erfahrung mit den TXE (Hauptmodul) und dazu 2x Lipo7 habe ich effektiv nie einen Schaden auf dem Akku erlebt. Der älteste Akku (auch von IISI) hatte 297 Flüge und habe ich leider während einen Crash physisch kaputt gemacht (verbogen). Sonst würde er noch fliegen.
Meinen aktuellen Packs haben einerseits 250 Flüge (Alarm bei 3.2 eingestellt, entlade Kapazität von 75% kommt fast immer zuerst) andererseits 140 Flüge (Alarm bei 3.3V aber noch nie gekommen).
Dazu für diejeniegen, die ohne BEC und mit 2 Empfänger-Akkus fliegen einen IISI BM2 benützen.
Gruss
Boris
Erstmals, super cooles Projekt. Es macht Spass, aussergewöhnliche Lösungen und Konstruktionen für einen grossen Kunstflugmodell zu sehen! Bitte mehr berichten, es hilft uns inspiriert sicher vielen von uns!
Bettreffend dein Offtopic Thema kann ich deine Lösung 100% empfehlen.
Ok, muss ich es sagen, ich kenne den IISI-Gründer seit 15 Jahren und bin mit den allerersten Prototypen geflogen.
Das gesagt, ich muss auch sagen: ein 2m30 Maschine fliege ich nicht mehr ohne IISI-Telemetrie. Wenn den Cockpit mal leer ist oder etwas schief läuft, fliege ich einfach nicht. Warum? Weil ich einmal vor 10 Jahren, einen Alarm ignorieret habe... und den Flugzeug gecrasht habe.
Als Erfahrung mit den TXE (Hauptmodul) und dazu 2x Lipo7 habe ich effektiv nie einen Schaden auf dem Akku erlebt. Der älteste Akku (auch von IISI) hatte 297 Flüge und habe ich leider während einen Crash physisch kaputt gemacht (verbogen). Sonst würde er noch fliegen.
Meinen aktuellen Packs haben einerseits 250 Flüge (Alarm bei 3.2 eingestellt, entlade Kapazität von 75% kommt fast immer zuerst) andererseits 140 Flüge (Alarm bei 3.3V aber noch nie gekommen).
Dazu für diejeniegen, die ohne BEC und mit 2 Empfänger-Akkus fliegen einen IISI BM2 benützen.
Gruss
Boris
Hello all
I know it is German forum but can write English or Spanish, so sorry for this.
First of all congratulations Tobias for your very cool project, it's very nice to see young people getting involved in such complex model and develope such innovation.
About the batteries, since some time ago I'm using both alarms, mAh and voltage, my setting is 3.55v per cell. What I discovered after many flights is that both alarms are very useful, because during hard throttle I reach the voltage alarm first, but during normal throttle the first alarm is from capacity. It is very interesting because in both alarms you have a protection in the best way for the batteries, lower than 3.55 is killer for the batteries. Some of my packs (10S) are 6 years old, and have more than 200 flights, and still flying very nice.
I know it is German forum but can write English or Spanish, so sorry for this.
First of all congratulations Tobias for your very cool project, it's very nice to see young people getting involved in such complex model and develope such innovation.
About the batteries, since some time ago I'm using both alarms, mAh and voltage, my setting is 3.55v per cell. What I discovered after many flights is that both alarms are very useful, because during hard throttle I reach the voltage alarm first, but during normal throttle the first alarm is from capacity. It is very interesting because in both alarms you have a protection in the best way for the batteries, lower than 3.55 is killer for the batteries. Some of my packs (10S) are 6 years old, and have more than 200 flights, and still flying very nice.