Aschi
User
Hi, MeiT, (ohne Namen ?)
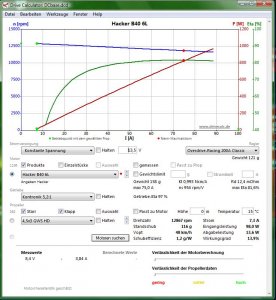
Ich meine nein ,es kann nicht sein, denn mit den von den LMT übernommenen Daten , und was DC daraus macht kann was nicht stimmen. Da steht in der Berechnung ein Ri Dynamisch von 2,8 mOhm. Das kann so nicht sein denn der Motor hat ja schon einen Statischen Wert von ca 5-8 mOhm, so genau weiss ich das momentan nicht. Da sich der Dynamische Ri aus allen Verlusten abbildet kann das so nicht sein, bzw. darum sieht die Rechnung so verdammt gut aus.
So und nun die ganze Geschichte warum gerade so ein Hacker bei mir rumliegt.
Im Nachbarverein gibt es einen der hat so einen Edel Voll GFK Hotliner aus alten Zeiten mit 10 (Nicad) Zellen und genau diesem Motor. Nun hat der Gute , der von Antrieben überhaupt nichts versteht das ganze auf 3 Lipos umgebaut. Beim ersten Flug gab es ein kleines Fiasko und der Flieger war nicht mehr Kontrollierbar, bzw. der Regler konnte nicht mehr zurückgeregelt werden. Irgend wie konnte die Kiste aber doch noch heil gelandet werden.
Nun war die Frage eben was geht da ab bzw ist da Faul ??
Montiert war eine Cam Folding 14*9,5 und der Akku war ei 3 S 2600 V-MAXX 35 C von Graupner.
Ich hab das alles aus dem Rumpf ausgebaut und in meine Prüfstands –Halterung montiert.
Als erstes ist mir sofort der extrem hohe Leerlauf Strom aufgefallen, da stellt sich natürlich sofort die Frage ob der Rotor abmagnetisiert ist ,oder ob der Steller ein falsches Timing hat.
Also gleich nen Jive 100 als Referenz dran gehängt und schon war der Leerlauf Strom in der erwarteten Region.
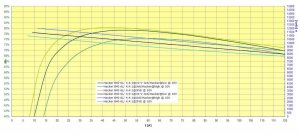
Also mal erst eine Reihe Daten aufgenommen so wie ich den „Plunder“ bekommen habe und ausgewertet. Das Ergebnis war dann wie erwartet (bei so hohem Io ) schlecht.
Weil ich ja neugierig und misstrausch bin gleich noch mal die selben Last Daten aufgenommen ,aber dann mit dem Jive. Das sah dann schon besser aus.
Im nächsten Step wurde dann das Timing vom Hacker Regler reduziert (sieht man ja am Io )
Und dann das ganze Prozedere wieder von vorne")
Zusammenfasend kann man sagen so wie ich das in die Hände bekommen habe, kann es nicht Funktionieren. Der Ri des (vermutlich kalten ) unterdimensionierten Akkus hat dem Steller
das Leben gerettet . Denn hätte der Akku die Spannung gehalten wären doch weit über 100 A durch die nur 2,5 mm² Verkabelung mit den 4 mm Steckern“ gebrutzelt“ worden und der Flieger wäre als Fackel vom Himmel gefallen")
An diesem Beispiel sieht man schön weil es doch „vorher“ sooooo gut Funktioniert hat
wie der Otto Normalbürger mit seinen (damals) P+M Akkus beschissen wurde und die tatsächliche Spannung der Akkus doch sehr weit weg vom Wunschdenken war.- Logger gab es ja damals nicht.
Übrigens, warum das ganze in DC so schlecht aussieht, Ralph hat es schon so oft erwähnt das verwendete Rechenmodell ist extrem Leerlauf-Lastig und das ist natürlich bei solchen Motoren (mit wenig Windungen ) Gift. Es darf sich also jeder seine“ Wunsch-Kennlinie „ ein bischen weiter oben hinmalen, bzw das ganze durch die Lila Brille betrachten.
Das mit dem Leerlauf –lastig könnt ihr in DC auch bei der hochdrehenden Version des Kira 480 beobachten, der ist ja auch im Vergleich zu den anderen „Grottenschlecht“
Grüße
Thomas
meine Frage ist eben, ob es wirklich sein könnte?
Ich meine nein ,es kann nicht sein, denn mit den von den LMT übernommenen Daten , und was DC daraus macht kann was nicht stimmen. Da steht in der Berechnung ein Ri Dynamisch von 2,8 mOhm. Das kann so nicht sein denn der Motor hat ja schon einen Statischen Wert von ca 5-8 mOhm, so genau weiss ich das momentan nicht. Da sich der Dynamische Ri aus allen Verlusten abbildet kann das so nicht sein, bzw. darum sieht die Rechnung so verdammt gut aus.
So und nun die ganze Geschichte warum gerade so ein Hacker bei mir rumliegt.
Im Nachbarverein gibt es einen der hat so einen Edel Voll GFK Hotliner aus alten Zeiten mit 10 (Nicad) Zellen und genau diesem Motor. Nun hat der Gute , der von Antrieben überhaupt nichts versteht das ganze auf 3 Lipos umgebaut. Beim ersten Flug gab es ein kleines Fiasko und der Flieger war nicht mehr Kontrollierbar, bzw. der Regler konnte nicht mehr zurückgeregelt werden. Irgend wie konnte die Kiste aber doch noch heil gelandet werden.
Nun war die Frage eben was geht da ab bzw ist da Faul ??
Montiert war eine Cam Folding 14*9,5 und der Akku war ei 3 S 2600 V-MAXX 35 C von Graupner.
Ich hab das alles aus dem Rumpf ausgebaut und in meine Prüfstands –Halterung montiert.
Als erstes ist mir sofort der extrem hohe Leerlauf Strom aufgefallen, da stellt sich natürlich sofort die Frage ob der Rotor abmagnetisiert ist ,oder ob der Steller ein falsches Timing hat.
Also gleich nen Jive 100 als Referenz dran gehängt und schon war der Leerlauf Strom in der erwarteten Region.
Also mal erst eine Reihe Daten aufgenommen so wie ich den „Plunder“ bekommen habe und ausgewertet. Das Ergebnis war dann wie erwartet (bei so hohem Io ) schlecht.
Weil ich ja neugierig und misstrausch bin gleich noch mal die selben Last Daten aufgenommen ,aber dann mit dem Jive. Das sah dann schon besser aus.
Im nächsten Step wurde dann das Timing vom Hacker Regler reduziert (sieht man ja am Io )
Und dann das ganze Prozedere wieder von vorne
Zusammenfasend kann man sagen so wie ich das in die Hände bekommen habe, kann es nicht Funktionieren. Der Ri des (vermutlich kalten ) unterdimensionierten Akkus hat dem Steller
das Leben gerettet . Denn hätte der Akku die Spannung gehalten wären doch weit über 100 A durch die nur 2,5 mm² Verkabelung mit den 4 mm Steckern“ gebrutzelt“ worden und der Flieger wäre als Fackel vom Himmel gefallen
An diesem Beispiel sieht man schön weil es doch „vorher“ sooooo gut Funktioniert hat
wie der Otto Normalbürger mit seinen (damals) P+M Akkus beschissen wurde und die tatsächliche Spannung der Akkus doch sehr weit weg vom Wunschdenken war.- Logger gab es ja damals nicht.
Übrigens, warum das ganze in DC so schlecht aussieht, Ralph hat es schon so oft erwähnt das verwendete Rechenmodell ist extrem Leerlauf-Lastig und das ist natürlich bei solchen Motoren (mit wenig Windungen ) Gift. Es darf sich also jeder seine“ Wunsch-Kennlinie „ ein bischen weiter oben hinmalen, bzw das ganze durch die Lila Brille betrachten.
Das mit dem Leerlauf –lastig könnt ihr in DC auch bei der hochdrehenden Version des Kira 480 beobachten, der ist ja auch im Vergleich zu den anderen „Grottenschlecht“
Grüße
Thomas