Kraftei
User
Hi zusammen,
das hier ist nichts Neues, aber ich habe hier mal ein paar Infos und Bezugsquellen für eine kleine, kompakte CNC-Steuerung zusammengepackt, da ich vor dem Problem stand, für meine MiniMill Kit2 auf eine Steuerung umzubauen, auf welche ich ESTLCAM flashen kann.
Die Mechanik der Minimill ist super; sie geht durch Aluminium wie das sprichwörtliche, heiße Messer, durch die Butter, aber leider lässt die originale Steuerung nur den Betrieb mit der herstellereigenen Software zu, und mit dieser werde ich irgendwie nicht warm.
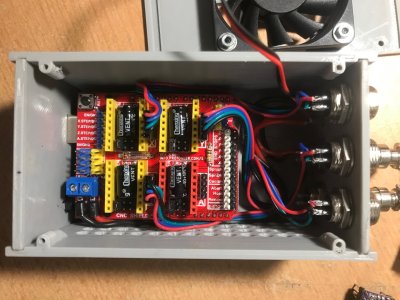
Also musste eine "Universalsteuerung" auf Arduino-Basis i.V. mit dem bekannten CNC-Shield her.
Wie gesagt, es gibt unzählige Beiträge hierzu; hier sind meine 2 Cent:
Der Umbau ist zwar noch nicht zu 100% abgeschlossen, steht aber kurz davor.
Ich drücke mich gerade noch ein wenig davor, die ganze Kabelage umzurüsten (habe Schleppketten-taugliches, geschirmtes Lapp-Kabel besorgt), und in Schleppketten zu legen.
Aber die Steuerung ist fertig. Zunächst GRBL 1.1 (mit Hilfe von Laser-GRBL) geflasht (GRBL-Flashen siehe auch hier und zum Wechsel GRBL / ESTLCAM hier) und danach Estcam draufgeschoben - läuft (zumindest "trocken").
Glücklicherweise sind an der MiniKit2 4mm KGUS verbaut (d.h. 4 = Teiler von 360, perfekt!) so dass ich bei Halbschrit (400 Halb-Schritte à 0,9°) exakt 0,01mm / (Halb-)Schritt erreiche, und nicht einen krummen Wert, wie bspsw. mit einer 5mm Spindel. (Schrittverluste jetzt mal nicht eingerechnet).
Ich habe mich entschlossen, diesen Microstepping-Wahn nicht mitzumachen, und stattdessen auf erhöhte Haltekraft (soweit ich gelesen habe, nur bei Voll- und Halbschritt?) zu setzen.
Ich hoffe mal, das ist am Ende effektiver, als irgendwelche theoretischen Mikrometer-Schritte, welche die Hardware eh' nicht umsetzen kann, oder liege ich da falsch?
Kann dazu jemand etwas sagen?
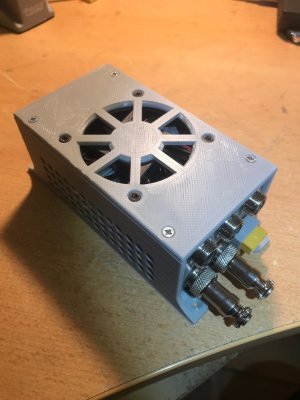
Habe mich für 24V Eingangsspannung entschieden, da ich günstig an ein solides Mean-Well Netzteil gekommen bin (siehe Foto).
In den beiden verblebenden GX12 Steckern habe ich nun noch Optionen für Stromversorgung einer Beleuchtung, Endschalter u. Not-AUS etc.
Der "Bau" hat Spaß gemacht, und ich bin nun maximal flexibel!
Hier also die Quellen der verwendeten Komponenten als Vorschlag, damit die Nachbau Interessierten das Zeugs nicht erst umständlich zusammensuchen müssen:
Arduino UNO + CNC-V3 Shield (incl. 8825 Treibern 11,95€") )
)
Gehäuse 3D-Druck f. Arduino m. CNC-Shield
Lüfter 24V 60 x 60 x 10mm
Stecker GX12 4 pol
Kabel mit Dupont Steckern
Lapp-Kabel 4x 0,25 schleppkettentauglich
JST PH Leergehäuse 6 polig f. Schrittmotor
JST PH Crimpkontakt 28-32 AWG f. Schrittmotor
Stecker + Buchse XT-60
Holgi
das hier ist nichts Neues, aber ich habe hier mal ein paar Infos und Bezugsquellen für eine kleine, kompakte CNC-Steuerung zusammengepackt, da ich vor dem Problem stand, für meine MiniMill Kit2 auf eine Steuerung umzubauen, auf welche ich ESTLCAM flashen kann.
Die Mechanik der Minimill ist super; sie geht durch Aluminium wie das sprichwörtliche, heiße Messer, durch die Butter, aber leider lässt die originale Steuerung nur den Betrieb mit der herstellereigenen Software zu, und mit dieser werde ich irgendwie nicht warm.
Also musste eine "Universalsteuerung" auf Arduino-Basis i.V. mit dem bekannten CNC-Shield her.
Wie gesagt, es gibt unzählige Beiträge hierzu; hier sind meine 2 Cent:
Der Umbau ist zwar noch nicht zu 100% abgeschlossen, steht aber kurz davor.
Ich drücke mich gerade noch ein wenig davor, die ganze Kabelage umzurüsten (habe Schleppketten-taugliches, geschirmtes Lapp-Kabel besorgt), und in Schleppketten zu legen.
Aber die Steuerung ist fertig. Zunächst GRBL 1.1 (mit Hilfe von Laser-GRBL) geflasht (GRBL-Flashen siehe auch hier und zum Wechsel GRBL / ESTLCAM hier) und danach Estcam draufgeschoben - läuft (zumindest "trocken").
Glücklicherweise sind an der MiniKit2 4mm KGUS verbaut (d.h. 4 = Teiler von 360, perfekt!) so dass ich bei Halbschrit (400 Halb-Schritte à 0,9°) exakt 0,01mm / (Halb-)Schritt erreiche, und nicht einen krummen Wert, wie bspsw. mit einer 5mm Spindel. (Schrittverluste jetzt mal nicht eingerechnet).
Ich habe mich entschlossen, diesen Microstepping-Wahn nicht mitzumachen, und stattdessen auf erhöhte Haltekraft (soweit ich gelesen habe, nur bei Voll- und Halbschritt?) zu setzen.
Ich hoffe mal, das ist am Ende effektiver, als irgendwelche theoretischen Mikrometer-Schritte, welche die Hardware eh' nicht umsetzen kann, oder liege ich da falsch?
Kann dazu jemand etwas sagen?
Habe mich für 24V Eingangsspannung entschieden, da ich günstig an ein solides Mean-Well Netzteil gekommen bin (siehe Foto).
In den beiden verblebenden GX12 Steckern habe ich nun noch Optionen für Stromversorgung einer Beleuchtung, Endschalter u. Not-AUS etc.
Der "Bau" hat Spaß gemacht, und ich bin nun maximal flexibel!
Hier also die Quellen der verwendeten Komponenten als Vorschlag, damit die Nachbau Interessierten das Zeugs nicht erst umständlich zusammensuchen müssen:
Arduino UNO + CNC-V3 Shield (incl. 8825 Treibern 11,95€
)Gehäuse 3D-Druck f. Arduino m. CNC-Shield
Lüfter 24V 60 x 60 x 10mm
Stecker GX12 4 pol
Kabel mit Dupont Steckern
Lapp-Kabel 4x 0,25 schleppkettentauglich
JST PH Leergehäuse 6 polig f. Schrittmotor
JST PH Crimpkontakt 28-32 AWG f. Schrittmotor
Stecker + Buchse XT-60
HolgiAnhänge



Zuletzt bearbeitet:
