Hi,
ich bastel in letzter zeit geheuft mit dem arduino, und für die multicopter auch mit den Wii sensoren rum.
da kam mir der gedanke, das es dammit doch auch möglich sein sollte eine kleine wuchtmaschiene für den hobbyeinsatz zu bauen")
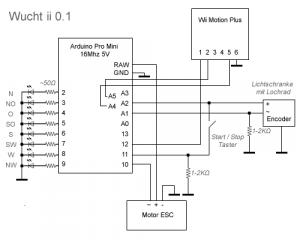
der gedanke war: eine 2fach kugelgelagerte welle wo das obere(an der Seite wo nachehr die last dran kommt) so gelagert ist das die welle sich in alle richtungen drehen kann und das untere sollte dann mit gummies oder federn beweglich sein. (siehe skizze)
das ganze könnte dann mit einem langsam drehenden brushless betrieben werden (den kann der arduino ja auch steuern)
die sensoren (Wii motion plus) müssten auf der unterseite sitzen und würden so die schwingungen messen. um zu wissen wie die drehposition ist dachte ich mann könnte so ein lochrad mit lichtschranke aus ner alten kugelmaus nehmen.
die anzeige könnte ganz einfach mit einem LED kreis rund um die welle angezigt werden. so das da wo die unwucht hinzieht ein LED leuchtet.
natürlich wäre dafür schon ein bisschen rechnen und basteln nötig .. aber ich denke es sollte gehen ..
jetzt die fragen:
1. seht ihr da probleme?
2. hat da schon jemmand erfahrung mit sowas?
und natürlich hätte jemmand mit interesse und drehe") zeit und lust da mal ein paar teile für zu machen? ich würde die elektronik und die programmierung machen
zeit und lust da mal ein paar teile für zu machen? ich würde die elektronik und die programmierung machen
gruß
felix
ich bastel in letzter zeit geheuft mit dem arduino, und für die multicopter auch mit den Wii sensoren rum.
da kam mir der gedanke, das es dammit doch auch möglich sein sollte eine kleine wuchtmaschiene für den hobbyeinsatz zu bauen
der gedanke war: eine 2fach kugelgelagerte welle wo das obere(an der Seite wo nachehr die last dran kommt) so gelagert ist das die welle sich in alle richtungen drehen kann und das untere sollte dann mit gummies oder federn beweglich sein. (siehe skizze)
das ganze könnte dann mit einem langsam drehenden brushless betrieben werden (den kann der arduino ja auch steuern)
die sensoren (Wii motion plus) müssten auf der unterseite sitzen und würden so die schwingungen messen. um zu wissen wie die drehposition ist dachte ich mann könnte so ein lochrad mit lichtschranke aus ner alten kugelmaus nehmen.
die anzeige könnte ganz einfach mit einem LED kreis rund um die welle angezigt werden. so das da wo die unwucht hinzieht ein LED leuchtet.
natürlich wäre dafür schon ein bisschen rechnen und basteln nötig .. aber ich denke es sollte gehen ..
jetzt die fragen:
1. seht ihr da probleme?
2. hat da schon jemmand erfahrung mit sowas?
und natürlich hätte jemmand mit interesse und drehe
zeit und lust da mal ein paar teile für zu machen? ich würde die elektronik und die programmierung machen gruß
felix