flying-doctor
User
Graupner-Telemetrie-Protokoll "entschlüsselt":
Die gute Nachricht zuerst: die serielle Kommunikation ist seit gestern abend klar! :-)
Leider bin ich E-Technik-Laie. Kann nur etwas programmieren, aber kenne mich mit Hardware nicht so gut aus. Daher suche ich Mitmacher für ein spannendes Gemeinschaftsprojekt! Lust?")
Zusammenfassung / Abstract:
Es soll ein sehr leichter Spannungssensor und evtl. Höhensensor entwickelt werden, der an den Empfänger GR-16/12 angeschlossen werden kann. Innerhalb der nächsten Wochen/Monate soll ein funktionierender Prototyp entstehen und im Flug getestet werden.
Die Ausgangslage / Ziele:
Die Firma Graupner bietet mit ihrer HoTT(R)-Technologie meines Erachtens eine exzellente Fernsteuerung an. Die Sensoren sind prima, ich setze sie seit April oft ein.
Es gibt nur leider ein Problem: Für kleine Slowflyer, Shockies, Merlin & Co. sind die im Augenblick angebotenen Sensoren leider zu groß und zu schwer. Darum möchte ich gerne
selbst einen einfachen Spannungssensor für bis zu 3 Lipozellen entwickeln. Das Ganze soll mit Kabeln, Schrumpfschlauch und Vorwiderständen höchstens 8-10 Gramm wiegen. Realistisch ist ein robuster, alltagstauglicher Sensor unter 20 €. Ich sehe das als Übergangslösung solange, bis die Firma Graupner selbst einen kleineren Sensor ins Angebot nimmt. Verkaufen möchte ich nichts, sondern das zu entwickelnde Sensorboard als Open Source der Allgemeinheit kostenlos zur Verfügung stellen")
Vorschlag für einen Projektnamen:
Ein Projekt braucht einen Namen
"open tecodino-Sensor".
Dies steht für telemetry compatible arduino sensor
Da die Markenrechte der Firma Graupner auf keinen Fall geschädigt werden dürfen, möchte ich darauf hinweisen, dass hier Markennamen wie HoTT oder Graupner schützenswert sind und in diesem Thread nicht weiter verwendet werden sollten! Außer, um darauf hinzuweisen, dass man zum Betrieb des tecodino-sensors noch einen original HoTT-Empfänger von Graupner kaufen sollte!
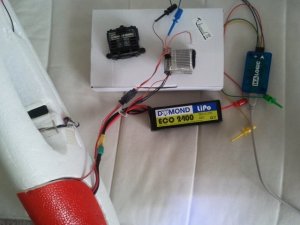
Anschluss des Tecodinos an den Empfänger:
Die Graupnermodule z.B. GAM, wird mit einem üblichen Servokabel an einen Empfänger z.B. GR-16 angeschlossen. Über die rote Litze des servokabels wird das Modul mit +4,8 V (?)Spannung versorgt. Die Sensoren liefern seriell diverse Messdaten über 2 Leitungen an das Empfängermodul (Braun = GND, Orange = Signal)
Schema: General-Air-Modul <------> GR-16/GR-12 - - - - 2,4 Ghz > MX-16/12-Fernsteuerung/Sender
Der neu zu entwickelnde Sensor soll genau so an die Empfänger angeschlossen werden:
Tecodino-Sensor <------> GR-16/GR-12 - - - - 2,4 Ghz > MX-16/12-Fernsteuerung/Sender
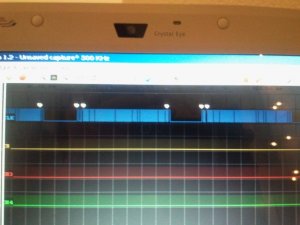
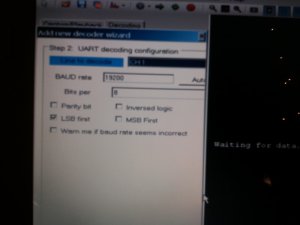
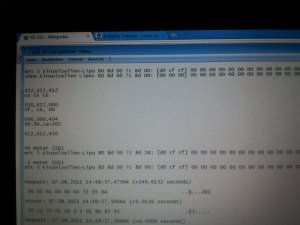
Das bedeutet, dass der Tecodino die serielle Kommunikation zum GR-16/GR-12 imitieren muss.
Die gute Nachricht zuerst: die serielle Kommunikation ist seit gestern abend klar! :-)
Leider bin ich E-Technik-Laie. Kann nur etwas programmieren, aber kenne mich mit Hardware nicht so gut aus. Daher suche ich Mitmacher für ein spannendes Gemeinschaftsprojekt! Lust?
Zusammenfassung / Abstract:
Es soll ein sehr leichter Spannungssensor und evtl. Höhensensor entwickelt werden, der an den Empfänger GR-16/12 angeschlossen werden kann. Innerhalb der nächsten Wochen/Monate soll ein funktionierender Prototyp entstehen und im Flug getestet werden.
Die Ausgangslage / Ziele:
Die Firma Graupner bietet mit ihrer HoTT(R)-Technologie meines Erachtens eine exzellente Fernsteuerung an. Die Sensoren sind prima, ich setze sie seit April oft ein.
Es gibt nur leider ein Problem: Für kleine Slowflyer, Shockies, Merlin & Co. sind die im Augenblick angebotenen Sensoren leider zu groß und zu schwer. Darum möchte ich gerne
selbst einen einfachen Spannungssensor für bis zu 3 Lipozellen entwickeln. Das Ganze soll mit Kabeln, Schrumpfschlauch und Vorwiderständen höchstens 8-10 Gramm wiegen. Realistisch ist ein robuster, alltagstauglicher Sensor unter 20 €. Ich sehe das als Übergangslösung solange, bis die Firma Graupner selbst einen kleineren Sensor ins Angebot nimmt. Verkaufen möchte ich nichts, sondern das zu entwickelnde Sensorboard als Open Source der Allgemeinheit kostenlos zur Verfügung stellen
Vorschlag für einen Projektnamen:
Ein Projekt braucht einen Namen
"open tecodino-Sensor".
Dies steht für telemetry compatible arduino sensor
Da die Markenrechte der Firma Graupner auf keinen Fall geschädigt werden dürfen, möchte ich darauf hinweisen, dass hier Markennamen wie HoTT oder Graupner schützenswert sind und in diesem Thread nicht weiter verwendet werden sollten! Außer, um darauf hinzuweisen, dass man zum Betrieb des tecodino-sensors noch einen original HoTT-Empfänger von Graupner kaufen sollte!
Anschluss des Tecodinos an den Empfänger:
Die Graupnermodule z.B. GAM, wird mit einem üblichen Servokabel an einen Empfänger z.B. GR-16 angeschlossen. Über die rote Litze des servokabels wird das Modul mit +4,8 V (?)Spannung versorgt. Die Sensoren liefern seriell diverse Messdaten über 2 Leitungen an das Empfängermodul (Braun = GND, Orange = Signal)
Schema: General-Air-Modul <------> GR-16/GR-12 - - - - 2,4 Ghz > MX-16/12-Fernsteuerung/Sender
Der neu zu entwickelnde Sensor soll genau so an die Empfänger angeschlossen werden:
Tecodino-Sensor <------> GR-16/GR-12 - - - - 2,4 Ghz > MX-16/12-Fernsteuerung/Sender
Das bedeutet, dass der Tecodino die serielle Kommunikation zum GR-16/GR-12 imitieren muss.






 :rolleyes:")

 und durch selber entschlüsseln lernt man bestimmt mehr, oder?
und durch selber entschlüsseln lernt man bestimmt mehr, oder?
