Ich bin nicht annähernd ein Tüftler und Entwickler wie Christian, der Eröffner dieses threads. Ich greife dann bei den diversen Antriebs-Varianten eher auf Kauf-Produkte des Marktes zurück. Das tüfteln findet bei mir eher am Modell statt.
Christian, ich hoffe, es ist OK, wenn hier nicht nur die schöpferischen Antriebs-Entwicklungen/Erfindungen zum Zuge kommen, sondern die RCN-User auch allgemeine Erfahrensberichte mit Außenbord-Motoren lesen können. Hier sind dann doch etliche stille Mitleser und "stille Nachbauer".
Ich würde das an dieser Stelle gerne tun und über meine Erfahrungen mit einem Außenborder aus dem Hause MHZ berichten. In meinem post #11 hatte ich bereits über meinen kläglichen Versuch berichtet ein Mono mit ca. 1,40mtr. Länge und einer Verdrängung von knapp unter 5 kg mit einem Außenborder auszustatten, der aus einem K&B 3,5 Unterteil und einem Leopard Inrunner der Baugröße 36 bestehen sollte.
Als Alternative zu der oben beschriebenen Kombo bin ich bei MHZ fündig geworden. Der 2021 bei MHZ gefundene Außenbordmotor ist aktuell nicht mehr im MHZ-Lieferprogramm.
Mir hat dieser Antrieb seinerzeit imponiert, weil er a) von seinen Abmessungen perfekt zu meinem Modell-Maßstab passte und b) weil er für Motoren der der 40-iger, aber auch der 50-iger Baugröße geeignet war. Ich entschied mich für einen exclusiv von MHZ vertriebenen, wassergekühlten Scorpion Außenläufer. Konkret, ein 4035 mit 1260kv. Dafür hatte ich Strom aus 8 Lipozellen vorgesehen.
Vorab eine Bitte - keine Kommentierungen zur Positionierung des Außenborders. Ja, er hängt zu tief. Das war alles Neuland für mich und viel testen/probieren.
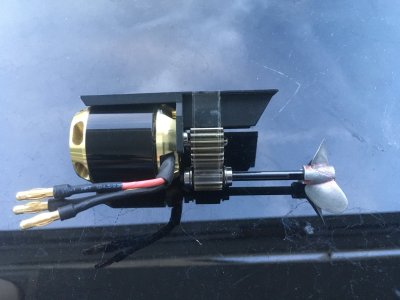
Auch dieser Außenborder wird über Kegelräder angetrieben. Zum Lieferumfang gehörte neben einer Tube Wellenfett eine weitere Tube mit Getriebe-Öl und diverse O-Ringe als Ersatz. Das Getriebe-Öl wurde per Spritze in das untere Alugußgehäuse injiziert. Dazu mußte eine Entlüftungsschraube geöffnet werden. Lt. MHZ sollte das Geriebe-Öl nach jedem Einsatz gewechselt werden und das ausgelaufene Oel sollte auf Metallspäne untersucht werden. Anscheinend hatte MHZ nicht viel Vertrauen in die Kegelräder

Die grundsätzliche Problematik mit Kegelrädern im Außenborder kam in diesem thread schon zur Sprache. Bei meiner ersten Testfahrt schaffte ich mit einer gefahrenen Kurve 2 x 50mtr. und dann lief mein Gaskanal ins Leere. Zuhause habe ich den Außenborder zerlegt und sehr viel lose Stahlteile vorgefunden (Zahnausfall). Nach einem Telefonat mit Ernest (MHZ) habe ich den AB eingeschickt und nach 1 Woche lag das Teil mit neuen Kegelrädern wieder auf der Werkbank.
Mit großer Erwartung dann die 2. Testfahrt, die etwas länger dauerte und weiter raus ging, aber auch schlußendlich nach 2 Minuten endete. Und wieder erzeugte meinen Gaskanal keinen Vorschub. Wieder die Kegelräder? Nein, diesmal war es die Hochlast-Kupplung, deren Mittelteil aus Hartgummi zerbröselt ist.
Zum besseren Verständnis hier 2 Fotos dieser besagten Hochlast-Kupplung. Einziger Unterschied zu meiner Kupplung - das Mittelteil war bei mir grau und nicht rot:
Quelle Foto: MHZ Powerboats
Quelle Foto: MHZ Powerboats
Wieder sehr lange mit MHZ telefoniert und ich weiß nicht wieviele Erklärungen ich für das "warum" erhalten. Schlußendlich habe ich dann aber auch kostenfrei eine neue Hochlastkupplung erhalten.
Wochen später war das Modell fertig. Ich auch:
Das war dann eines der ganz wenigen Bauprojekte, wo ich am Ende unzufrieden war, weil dieser Antrieb immer wieder für ein ungutes Gefühl in der Magengegend sorgte. Man wußte nie, ob das Modell mit eigener Motorkraft an Land kommt.
Und weil es ein Bauservice für einen Messe-Bekannten aus NRW war, war ich dann auch froh, als das Modell die Reise in Richtung NRW angetreten hat. Ich kann nichts über den momentanen technischen Stand des Außenborders sagen, weil das Modell meines Wissens lediglich 1x im Wasser war. Ansonsten die Zeit in einem Showroom, zusammen mit ca. 30 anderen sehr hochwertigen, einzeln angefertigen Schiffsmodellen verbringt.
Dieser Außenborder hatte bei MHZ seine Daseinsberechtigung und wurde das eine oder andere Mal an großen Monos auch doppelt verbaut. Dabei kamen beeindruckende Fahrbilder heraus. Ob die Eigner auf Dauer mit den Außenbordern glücklich geworden sind, ist öffentlich nicht bekannt (oder nur Insidern). MHZ hat die Außenborder (es gab noch eine kleinere Baugröße) mittlerweile komplett aus dem Programm genommen. Alternativ hat MHZ Z-Antriebe angeboten. Diese Z-Antriebe haben das selbe Unterteil wie der hier vorgestelle Außenborder. Aber auch die Z-Antriebe sind aktuell nicht lieferbar.
Bedenkt man, das dieser Außenbordmotor mit den vielen zusätzlichen Bauteilen, die man zum Betrieb erwerben muß, ca. € 800 kostet, dann sind meine beiden Totalausfälle eigentlich nicht zu akzeptieren. Ich habe nach diesen Erlebnissen das Kapitel "Außenbordmotor" begraben und beschäftige mich lieber mit funktionierenden, konventionellen Wellen-Antrieben. Die funktionieren immer (wenn sie richtig verbaut wurden).
Ich habe 2 YT-Video von einem Bauprojekt mit genau diesen MHZ-Außenbordern gefunden. Im ersten Video wird zwar primär auf den Umbau als Langschaft eingegangen - dennoch sehr interessant, wie ich finde.
Dieses 2. Video ist eigentlich nur interessant bis 0.27. a) wegen der SetUp-Beschreibung und b) wegen des sehr schönen Fahrbild. Nicht unerwähnt lassen möchte ich den genialen Sound der Scorpion Außenläufer. Hört sich fast schon wie ein Jet an.
")