Lownoise
User
Hallo, ich habe ein aus meiner Sicht komisches Phänomen:
Mein Brushlessmotor quietscht und heult bei viel/Vollgas bzw. wenn man schneller Gas gibt, aber.... nur bei älteren Akkus....?!? Er dreht weiter bzw man kann so fliegen, er stottert nicht spürbar und bleibt auch nicht stehen.
Bei neuen Akkus ist dieses bisher nicht aufgetreten, bei älteren, welche spürbar weniger Druck haben, auch erst etwa ab der zweiten Flughälfte.
Hatte jemand schon einmal sowas bzw. welchen Parameter kann man da verändern? Timing? Wenn ja, welche Richtung bewirkt was?
T-Motor 1507
7x3,5 GWS Propeller
35A HAKRC BL_Heli32
2s 350 mAh
BL_Heli ist ja Fluch und Segen zugleich, dass man ca. 20 Parameter in nahezu unendlichen Kombiantionsmöglichkeiten verändern kann... Habe schon PWM Frequenz und Timing von Voreinstellung auf Auto gestellt, ohne Erfolg bzw. Verbesserung.
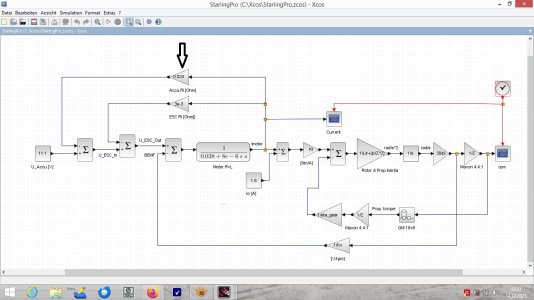
Habe leider kein Screenshot der aktuellen Einstellungen, nur zur Orientierung, das hier kann man alles einstellen (wer es nicht so gut kennt)

Mein Brushlessmotor quietscht und heult bei viel/Vollgas bzw. wenn man schneller Gas gibt, aber.... nur bei älteren Akkus....?!? Er dreht weiter bzw man kann so fliegen, er stottert nicht spürbar und bleibt auch nicht stehen.
Bei neuen Akkus ist dieses bisher nicht aufgetreten, bei älteren, welche spürbar weniger Druck haben, auch erst etwa ab der zweiten Flughälfte.
Hatte jemand schon einmal sowas bzw. welchen Parameter kann man da verändern? Timing? Wenn ja, welche Richtung bewirkt was?
T-Motor 1507
7x3,5 GWS Propeller
35A HAKRC BL_Heli32
2s 350 mAh
BL_Heli ist ja Fluch und Segen zugleich, dass man ca. 20 Parameter in nahezu unendlichen Kombiantionsmöglichkeiten verändern kann... Habe schon PWM Frequenz und Timing von Voreinstellung auf Auto gestellt, ohne Erfolg bzw. Verbesserung.
Habe leider kein Screenshot der aktuellen Einstellungen, nur zur Orientierung, das hier kann man alles einstellen (wer es nicht so gut kennt)










") So kann man gegenüber 2204er mit 8" Props etwa 7-10 g Gewicht sparen. je nach Regler und Kabel usw. Das Modell wiegt 103 g ohne Akku, also etwa 130 g flugfertig.
So kann man gegenüber 2204er mit 8" Props etwa 7-10 g Gewicht sparen. je nach Regler und Kabel usw. Das Modell wiegt 103 g ohne Akku, also etwa 130 g flugfertig.


