Hallo,
ich gebe zu, ich frage weil ich gerade etwas faul bin, aber man braucht das Rad oder die Fusion-Datei nicht 2x erfinden:
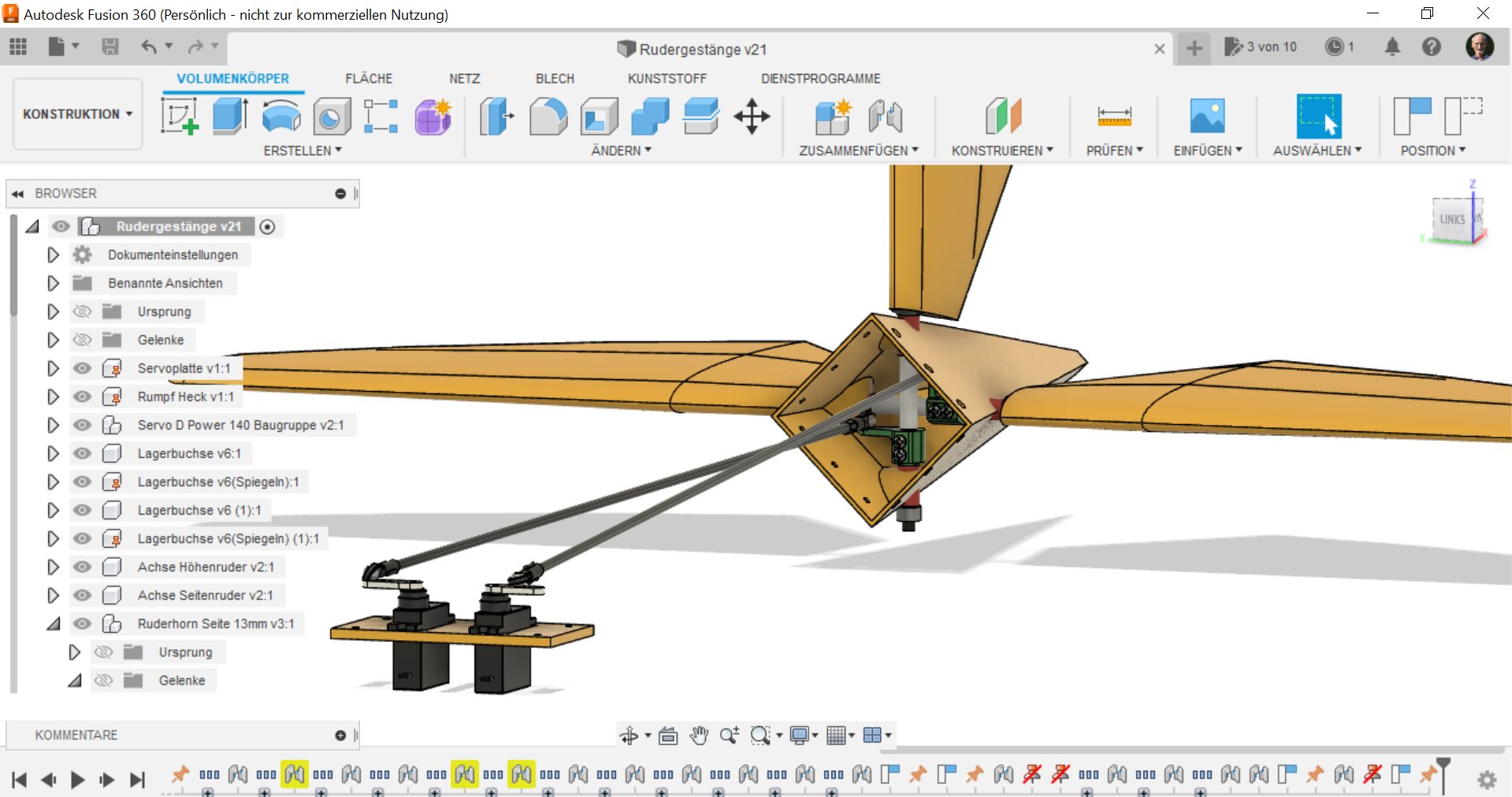
Ich möchte mir die Kinematik zwischen Servohebel und Ruderhorn und deren Winkel und Längen simulieren, um eine Überkreuzanlenkung ohne voriges "Probieren nach Gefühl" auslegen zu können. Fusion kann solche beweglichen Gelenke, das weiß ich, ich habe es nur noch nie gemacht und weiß deswegen auch noch nicht wie es geht. Ich stelle mir vor, ich hätte eine Skizze mit variablen Winkeln und Längen von Ruderhorn und Servohebel und könnte dann einfach virtuell den Servohebel um 45° drehen und schauen wieviel Ausschlag an der Wölbklappe ankommt und welchen Platz das Gestänge braucht usw. Ist ja mit den parametrischen Skizzen von Fusion alles schnell angepasst. Wenn man weiß wie ;-)
Hat da schon einer von euch was auf der Platte liegen?
Viele Grüße
Lars
ich gebe zu, ich frage weil ich gerade etwas faul bin, aber man braucht das Rad oder die Fusion-Datei nicht 2x erfinden:
Ich möchte mir die Kinematik zwischen Servohebel und Ruderhorn und deren Winkel und Längen simulieren, um eine Überkreuzanlenkung ohne voriges "Probieren nach Gefühl" auslegen zu können. Fusion kann solche beweglichen Gelenke, das weiß ich, ich habe es nur noch nie gemacht und weiß deswegen auch noch nicht wie es geht. Ich stelle mir vor, ich hätte eine Skizze mit variablen Winkeln und Längen von Ruderhorn und Servohebel und könnte dann einfach virtuell den Servohebel um 45° drehen und schauen wieviel Ausschlag an der Wölbklappe ankommt und welchen Platz das Gestänge braucht usw. Ist ja mit den parametrischen Skizzen von Fusion alles schnell angepasst. Wenn man weiß wie ;-)
Hat da schon einer von euch was auf der Platte liegen?
Viele Grüße
Lars
")