Kleinatze
Vereinsmitglied
Hallo Leute!
Sorry, dass ich diese Rubrik missbrauche, aber ich denke hier sind die Leute mit der meisten Erfahrung mit der RDS Anlenkung.
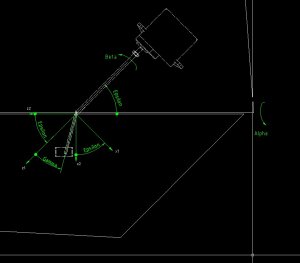
Zum Thema RDS - Anlenkung wurde schon einiges geschrieben - die Zusammenhänge zwischen dem Dornwinkel gamma, dem Einbauwinkel epsilon wurden mir aber nie wirklich klar.
Daher habe ich mir gerade ein script gebastelt, und wollte mal meine Ergebnisse zur Diskussion stellen.
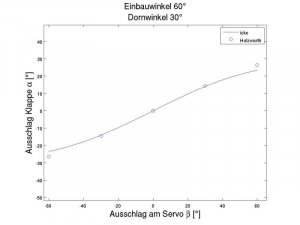
1.: Einfluss des Dornwinkels gamma auf die "Übertragungsfunktion" bei festem Einbauwinkel epsilon = 30°:

2. Einfluss des Einbauwinkels epsilons auf festen Dornwinkel gamma = 30°:

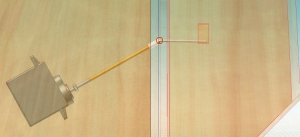
Hintergrund: Ich suche optimalen Einbauwinkel epsilon und Dornwinkel gamma für meinen Pylonrenner, wo ich nur kleine Ausschläge benötige. Das ganze soll möglichst linear funktionieren und v.a. spielfrei sein.
Gern würde ich auch meine Formel diskutieren, die dahinter steht, da ich mir nicht sicher bin, ob das alles korrekt ist, was ich mir da ausgedacht habe.
So, jetzt gehe ich erstmal ins Bett - Morgen mehr, sofern gewünscht!
Grüße
Andreas
Sorry, dass ich diese Rubrik missbrauche, aber ich denke hier sind die Leute mit der meisten Erfahrung mit der RDS Anlenkung.
Zum Thema RDS - Anlenkung wurde schon einiges geschrieben - die Zusammenhänge zwischen dem Dornwinkel gamma, dem Einbauwinkel epsilon wurden mir aber nie wirklich klar.
Daher habe ich mir gerade ein script gebastelt, und wollte mal meine Ergebnisse zur Diskussion stellen.
1.: Einfluss des Dornwinkels gamma auf die "Übertragungsfunktion" bei festem Einbauwinkel epsilon = 30°:
2. Einfluss des Einbauwinkels epsilons auf festen Dornwinkel gamma = 30°:
Hintergrund: Ich suche optimalen Einbauwinkel epsilon und Dornwinkel gamma für meinen Pylonrenner, wo ich nur kleine Ausschläge benötige. Das ganze soll möglichst linear funktionieren und v.a. spielfrei sein.
Gern würde ich auch meine Formel diskutieren, die dahinter steht, da ich mir nicht sicher bin, ob das alles korrekt ist, was ich mir da ausgedacht habe.
So, jetzt gehe ich erstmal ins Bett - Morgen mehr, sofern gewünscht!
Grüße
Andreas

") Und für den Rest ist's sowieso egal ..
Und für den Rest ist's sowieso egal ..