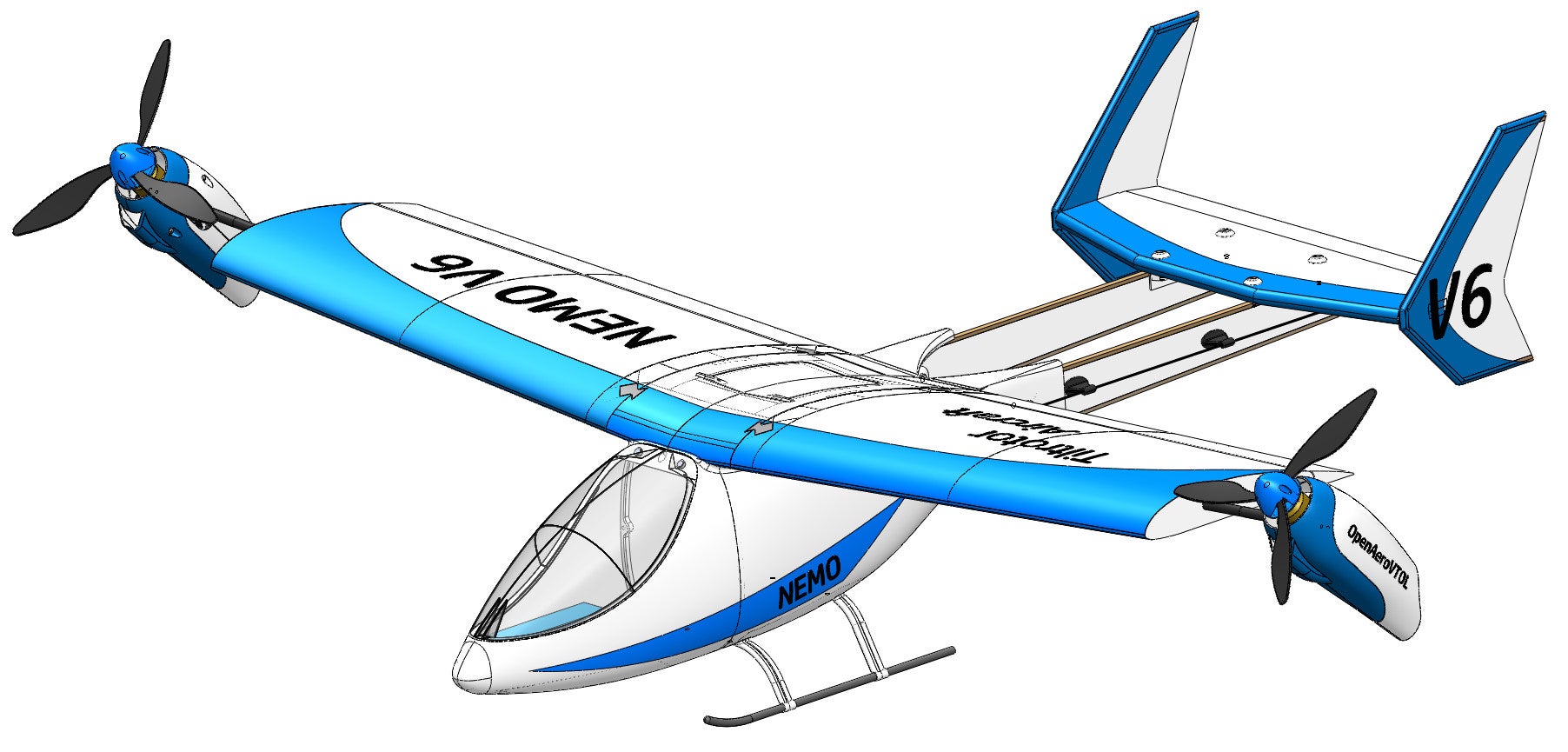
Heute durfte mein Senkrechtstarter Nemo seinen ersten Flug (Schwebephase) versuchen.
Das Besondere ist die Auslegung als Bicopter/Duokopter mit nur zwei tragenden Motoren, die zum Vorwärtsflug um 90° nach vorne geschwenkt werden. Es gibt keinen dritten tragenden Motor im Heck oder in der Nase. Daher ist die Regelung in Nick-Richtung (Höhenruder) besonders schwierig. Das schafft die Software dRehmFlight von Nicolas Rehm in meinen Augen hervorragend.
Als nächste Schritte müssen die PID-Werte der Regelung für den Schwebeflug weiter optimiert werden. Danach steht der Test des Übergangs in den schnelleren Vorwärtsflug an. Schließlich sollen die Motoren ganz in die Horizontale geschwenkt werden, damit das Modell als normale Zweimot fliegt. Und am Ende wird der Übergang vom Flächenflug zurück zur Landung im Schwebefug noch sehr spannend werden. Es gibt noch viel zu tun....
Material: Depron
Abfluggewicht: 780g
Akku: 3S, 2100mAh
Motor: DJI Mavic, je 31g
Flugcontroller: Teensy 4.1
Firmware: dRehmFlight 1.3
Vorstudie:
dRehmFlight: https://www.rcgroups.com/forums/sho...OL-Teensy-Flight-Controller-and-Stabilization
Nemo: https://www.rcgroups.com/forums/showthread.php?2773733-Nemo-An-Osprey-Like-Bi-Copter-Test-Bed
Das Besondere ist die Auslegung als Bicopter/Duokopter mit nur zwei tragenden Motoren, die zum Vorwärtsflug um 90° nach vorne geschwenkt werden. Es gibt keinen dritten tragenden Motor im Heck oder in der Nase. Daher ist die Regelung in Nick-Richtung (Höhenruder) besonders schwierig. Das schafft die Software dRehmFlight von Nicolas Rehm in meinen Augen hervorragend.
Als nächste Schritte müssen die PID-Werte der Regelung für den Schwebeflug weiter optimiert werden. Danach steht der Test des Übergangs in den schnelleren Vorwärtsflug an. Schließlich sollen die Motoren ganz in die Horizontale geschwenkt werden, damit das Modell als normale Zweimot fliegt. Und am Ende wird der Übergang vom Flächenflug zurück zur Landung im Schwebefug noch sehr spannend werden. Es gibt noch viel zu tun....
Material: Depron
Abfluggewicht: 780g
Akku: 3S, 2100mAh
Motor: DJI Mavic, je 31g
Flugcontroller: Teensy 4.1
Firmware: dRehmFlight 1.3
Vorstudie:
dRehmFlight: https://www.rcgroups.com/forums/sho...OL-Teensy-Flight-Controller-and-Stabilization
Nemo: https://www.rcgroups.com/forums/showthread.php?2773733-Nemo-An-Osprey-Like-Bi-Copter-Test-Bed