moin, moin,
wie im titel schon erwähnt, beschäftige ich mich, mit dem entwurf eines rc gesteuerten drachens.
dieser soll als canard ausgelegt und sein einsatzgebiet der hangflug bei leichten winden werden.
da ich schon eine ganze weile hier mitlese und auch schon wertvolle tipps bekommen habe,
denke ich, dass ich hier richtig aufgehoben bin.
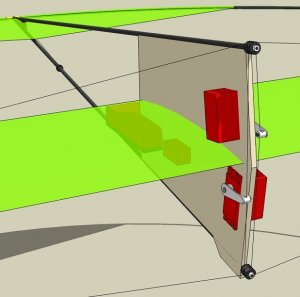
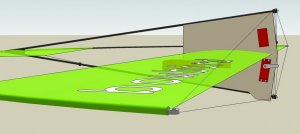
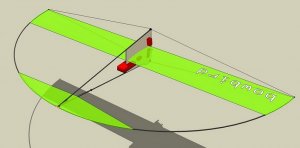
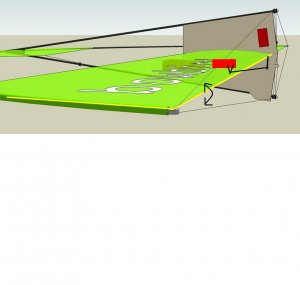
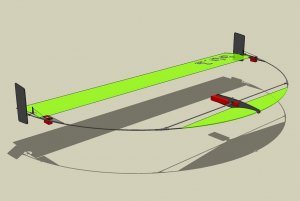
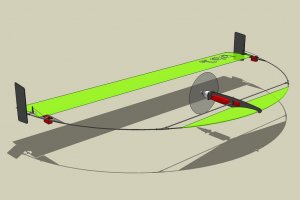
im anhang befinden sich einige renderings von den ersten skizzen, über die ich hier gerne diskutieren möchte.
auf den ersten blick wirkt das konzept nicht gerade überzeugend, dennoch bin ich der meinung, dass potential darin stecken könnte.
die abmessungen betragen ca 130cm / 65cm.
die stäbe bestehen aus 4mm kohlerohr.
das seitenleitwerk und gleichzeitig rc-träger setzt sich aus einer 4mm depronplatte, die partiell verstärkt und mit gfk beschichtet wird.
die seilverstrebungen würde ich mit dünner stahllitze und angelöteten gabelköpfen realisieren.
die bespannung erfolgt mit klassichem spinnakernylon.
was haltet ihr davon?
gruss tom



wie im titel schon erwähnt, beschäftige ich mich, mit dem entwurf eines rc gesteuerten drachens.
dieser soll als canard ausgelegt und sein einsatzgebiet der hangflug bei leichten winden werden.
da ich schon eine ganze weile hier mitlese und auch schon wertvolle tipps bekommen habe,
denke ich, dass ich hier richtig aufgehoben bin.
im anhang befinden sich einige renderings von den ersten skizzen, über die ich hier gerne diskutieren möchte.
auf den ersten blick wirkt das konzept nicht gerade überzeugend, dennoch bin ich der meinung, dass potential darin stecken könnte.
die abmessungen betragen ca 130cm / 65cm.
die stäbe bestehen aus 4mm kohlerohr.
das seitenleitwerk und gleichzeitig rc-träger setzt sich aus einer 4mm depronplatte, die partiell verstärkt und mit gfk beschichtet wird.
die seilverstrebungen würde ich mit dünner stahllitze und angelöteten gabelköpfen realisieren.
die bespannung erfolgt mit klassichem spinnakernylon.
was haltet ihr davon?
gruss tom