nichtgedacht
User
Moin,
Ich habe die Arduino Library:

 github.com
nochmal erweitert für 2 Sensoren.
github.com
nochmal erweitert für 2 Sensoren.
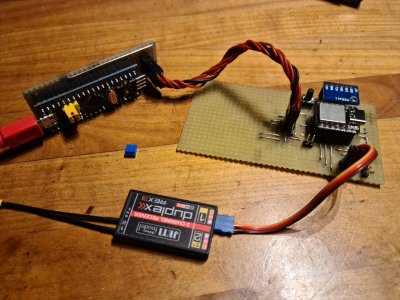
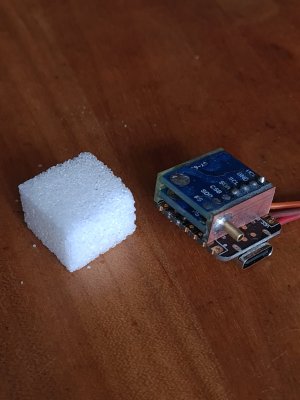
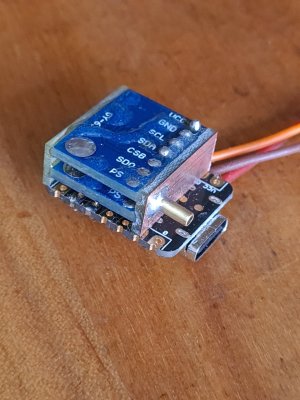
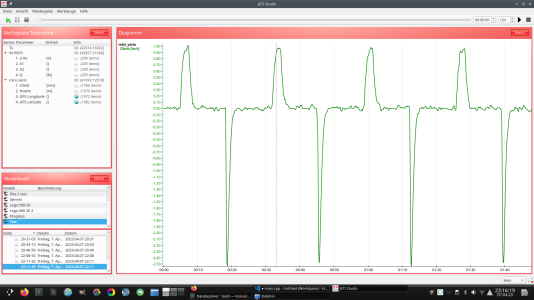
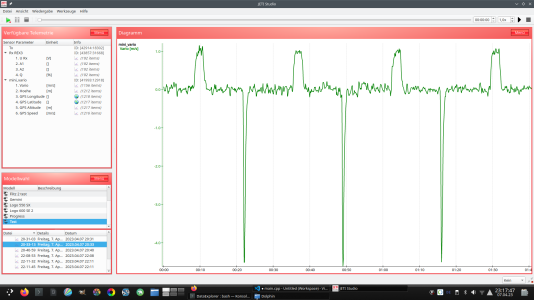
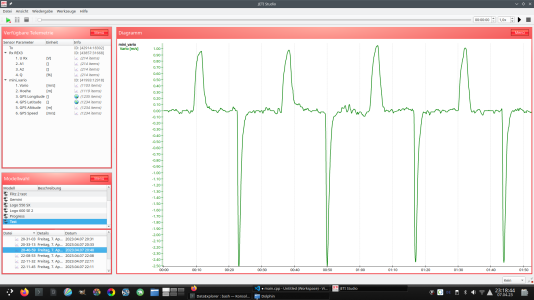
Im beigefügten Beispiel "Mini-Vario"
findet Ihr eine vollständige Implementation für Jeti EX.
Der Jeti Teil verwendet die Lib von Bernd in modifizierter Version:
 github.com
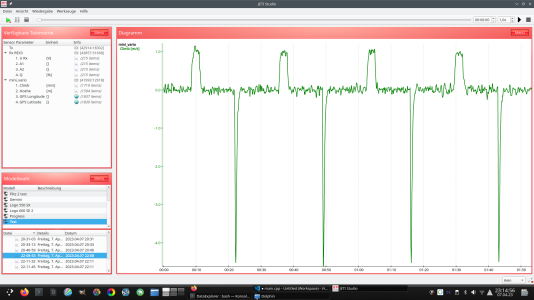
In dieser Lib kann man update Frequenz der EX Telemetrie anpassen.
github.com
In dieser Lib kann man update Frequenz der EX Telemetrie anpassen.
Gruß Dieter
Ich habe die Arduino Library:
GitHub - nichtgedacht/Arduino-MS5611-Interrupt: Interrupt driven version of Arduino-MS5611
Interrupt driven version of Arduino-MS5611. Contribute to nichtgedacht/Arduino-MS5611-Interrupt development by creating an account on GitHub.
github.com
Im beigefügten Beispiel "Mini-Vario"
findet Ihr eine vollständige Implementation für Jeti EX.
Der Jeti Teil verwendet die Lib von Bernd in modifizierter Version:
GitHub - Pulsar07/JetiExSensor: Simple C++ Library to send telemetry values via JETI DUPLEX EX
Simple C++ Library to send telemetry values via JETI DUPLEX EX - GitHub - Pulsar07/JetiExSensor: Simple C++ Library to send telemetry values via JETI DUPLEX EX
github.com
Gruß Dieter