lastdownxxl
User
Hallo,
das Drehmoment vom Motor beschleunigt den Rotor und die Last. Mehr Trägheitsmoment
vom Propeller bedeutet jetzt eine kleinere Winkelbeschleunigung Alpha des Propellers. Der Hochlauf erfolgt also langsamer.
Bei Anlaufen im Blindflug kann der Rotor daher bei einem zu hohen Trägheitsmoment einem zu schnellen beschleunigen vom Drehfeld durch den ESC nicht folgen, der Motor kommt außer tritt.
Alpha = Drehmoment/Trägheitsmoment
Die mech. Anlaufzeitkonstante Tau vom Hochlauf eines BLDC ist
Tau = R*(Jr+Jl)/(Kt²) [sec]
R... Wicklungswiderstand [Ohm]
Kt = (1/Kv)*(30/pi) [Nm/A]
Kv...[rpm/V]
Jr.. Trägheitsmoment Rotor [kgm²]
Jl.. Trägheitsmoment Last [kgm²]
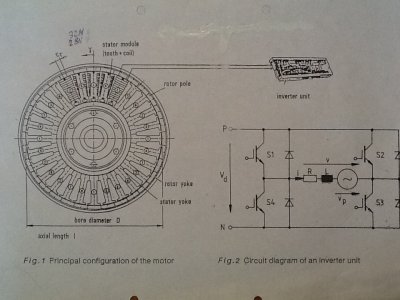
Regelungstechnisches Ersatzschaltbild eines BLDC-Motors.

Gruss
Micha
das Drehmoment vom Motor beschleunigt den Rotor und die Last. Mehr Trägheitsmoment
vom Propeller bedeutet jetzt eine kleinere Winkelbeschleunigung Alpha des Propellers. Der Hochlauf erfolgt also langsamer.
Bei Anlaufen im Blindflug kann der Rotor daher bei einem zu hohen Trägheitsmoment einem zu schnellen beschleunigen vom Drehfeld durch den ESC nicht folgen, der Motor kommt außer tritt.
Alpha = Drehmoment/Trägheitsmoment
Die mech. Anlaufzeitkonstante Tau vom Hochlauf eines BLDC ist
Tau = R*(Jr+Jl)/(Kt²) [sec]
R... Wicklungswiderstand [Ohm]
Kt = (1/Kv)*(30/pi) [Nm/A]
Kv...[rpm/V]
Jr.. Trägheitsmoment Rotor [kgm²]
Jl.. Trägheitsmoment Last [kgm²]
Regelungstechnisches Ersatzschaltbild eines BLDC-Motors.
Gruss
Micha
")