Hallo RCN,
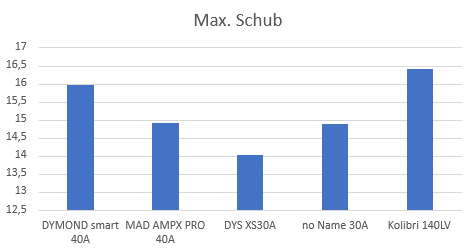
ich habe ein festes Antriebssetup an 3S. Zieht ca. 30A Dauer. Dafür suche ich einen ESC mit dem besten Wirkungsgrad bzw. den kleinsten Verlusten. Getestet sind die unten gezeigten ESCs bei 12V (Netzteil). Der Kolibri 140LV liefert die besten Ergebnisse, aber ist auch ein dicker/schwerer Klotz.
Gibt es Erfahrungen bzw. Vergleiche der Hacker, JETI, DPower und wie sie alle heißen ESCs? Das Gewicht sollte dabei so gering wie möglich bleiben.
Danke schonmal!
Grüße,
Henry
ich habe ein festes Antriebssetup an 3S. Zieht ca. 30A Dauer. Dafür suche ich einen ESC mit dem besten Wirkungsgrad bzw. den kleinsten Verlusten. Getestet sind die unten gezeigten ESCs bei 12V (Netzteil). Der Kolibri 140LV liefert die besten Ergebnisse, aber ist auch ein dicker/schwerer Klotz.
Gibt es Erfahrungen bzw. Vergleiche der Hacker, JETI, DPower und wie sie alle heißen ESCs? Das Gewicht sollte dabei so gering wie möglich bleiben.
Danke schonmal!
Grüße,
Henry


")

