kreidler
User
Richtig vermisse ich auch nichts, außer bei Verwendung eines MPX-Varios die 'Hemmschwelle' bevor das Teil losplärrt. Dieses Thema gab es vor einiger Zeit schon mal in diesem oder einem anderen Thread. Der Unilog 2 bietet diese Möglichkeit von Haus aus. Ich habe mich nur mal gefragt, ob die beiden Geräte vergleichbar sind.
Dazu habe ich einen Graupner Rookie (den Anfängersegler) mit beiden Sensoren ausgestattet und bin mal ein wenig geflogen. Das MPX-Vario klebte direkt auf dem Unilog und es war eine Integrationszeit von 1s eingestellt. Unilog2 hat die Werte mit 10Hz aufgezeichnet. Prio im RX war der Vario-Adresse des MPX-Varios zugeordnet.
Wie man sehen kann, wohne ich im nördlichen Teil der Republik") und es gab zwei sonnige Momente...
und es gab zwei sonnige Momente...
Die Höhenaufzeichnung sieht auf den ersten Blick gleich aus:

Im Detail sind doch kleine Differenzen sichtbar. Die Höhen nahe Null waren in Wirklichkeit ca. 0,2-0,5m. Bis dahin waren bei Höhenangaben näher beieinander:

Bei dieser Flugzeit bringt das Vario in der Übersicht nicht wirklich neue Erkenntnisse. Die Ausreisser nach unten sind entweder Anstechen (für Looping) oder Spiralsturz:

Detailierter scheint das MPX mehr zu zucken:

Geht man noch mehr in die Tiefe, sieht man ca. 4 Werte / Sekunde auf dem Bus vom MPX-Vario. SM zeichnet in diesem Fall ja mit 10Hz auf. Daher die optische Kurvenglättung.

Ich werde je nach Einsatzzweck beide Optionen weiter einsetzen.
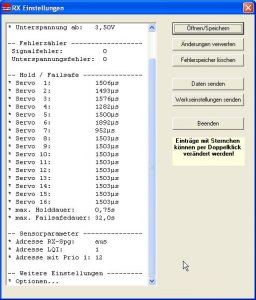
Welches Vario-Signal muss für die Erzeugung des Gepiepes verwendet werden? Unilog-Vario ist bei meiner Cockpit auf 7 und das MPX auf 12. Bei mir wird das von 7 genommen. Sagt die MSB-Spec etwas dazu oder sind zwei Varios nicht vorgesehen ?
?
Dazu habe ich einen Graupner Rookie (den Anfängersegler) mit beiden Sensoren ausgestattet und bin mal ein wenig geflogen. Das MPX-Vario klebte direkt auf dem Unilog und es war eine Integrationszeit von 1s eingestellt. Unilog2 hat die Werte mit 10Hz aufgezeichnet. Prio im RX war der Vario-Adresse des MPX-Varios zugeordnet.
Wie man sehen kann, wohne ich im nördlichen Teil der Republik
und es gab zwei sonnige Momente...Die Höhenaufzeichnung sieht auf den ersten Blick gleich aus:
Im Detail sind doch kleine Differenzen sichtbar. Die Höhen nahe Null waren in Wirklichkeit ca. 0,2-0,5m. Bis dahin waren bei Höhenangaben näher beieinander:
Bei dieser Flugzeit bringt das Vario in der Übersicht nicht wirklich neue Erkenntnisse. Die Ausreisser nach unten sind entweder Anstechen (für Looping) oder Spiralsturz:
Detailierter scheint das MPX mehr zu zucken:
Geht man noch mehr in die Tiefe, sieht man ca. 4 Werte / Sekunde auf dem Bus vom MPX-Vario. SM zeichnet in diesem Fall ja mit 10Hz auf. Daher die optische Kurvenglättung.
Ich werde je nach Einsatzzweck beide Optionen weiter einsetzen.
Welches Vario-Signal muss für die Erzeugung des Gepiepes verwendet werden? Unilog-Vario ist bei meiner Cockpit auf 7 und das MPX auf 12. Bei mir wird das von 7 genommen. Sagt die MSB-Spec etwas dazu oder sind zwei Varios nicht vorgesehen
?