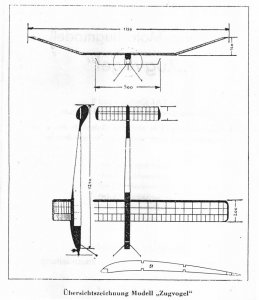
Guten Abend. Ich melde mich hier, weil ich vom Freiflug nichts verstehe und einen Rat von den Experten brauche. Als Junge hatte ich das Motor- Freiflugmodell „Zugvogel“ der damaligen FAI-Klasse II von Hans Finus (Bild!) gebaut und mache das jetzt noch einmal. Das Modell soll jetzt allerdings eine Fernsteuerung bekommen, siehe:
http://www.rclineforum.de/forum/boa...odelle/328989-baubericht-zugvogel-finus-grau/
Finus empfiehlt für den „Zugvogel“ eine EWD von 6 Grad. Damit habe das Modell die geringste Sinkgeschwindigkeit. Für ein ferngesteuertes Modell wäre das allerdings ein abenteuerlich hoher Wert (meistens haben sie, wenn es sich nicht um ausgesprochene Kunstflugmodelle handelt, 1 bis 2 Grad).
Meine Frage: Haben moderne Freiflugmodelle immer noch eine so hohe EWD? Und wo müßte dann ungefähr der Schwerpunkt liegen (die Angabe ist in den alten Unterlagen von Graupner/Finus seltsamerweise nicht enthalten)? Der „Zugvogel hat ein tragendes HLW-Profil, das Tragflächenprofil ist hier abgebildet; wie es heißt, weiß ich nicht.
Gruß Michael
http://www.rclineforum.de/forum/boa...odelle/328989-baubericht-zugvogel-finus-grau/
Finus empfiehlt für den „Zugvogel“ eine EWD von 6 Grad. Damit habe das Modell die geringste Sinkgeschwindigkeit. Für ein ferngesteuertes Modell wäre das allerdings ein abenteuerlich hoher Wert (meistens haben sie, wenn es sich nicht um ausgesprochene Kunstflugmodelle handelt, 1 bis 2 Grad).
Meine Frage: Haben moderne Freiflugmodelle immer noch eine so hohe EWD? Und wo müßte dann ungefähr der Schwerpunkt liegen (die Angabe ist in den alten Unterlagen von Graupner/Finus seltsamerweise nicht enthalten)? Der „Zugvogel hat ein tragendes HLW-Profil, das Tragflächenprofil ist hier abgebildet; wie es heißt, weiß ich nicht.
Gruß Michael