nichtgedacht
User
Hallo,
ich hatte dieses Projekt bereits bei mikrocontroller.net und fpv-community.de vorgestellt.
Leider interessiert das dort niemanden. Jedenfalls kamen von dort keine Rückmeldungen.
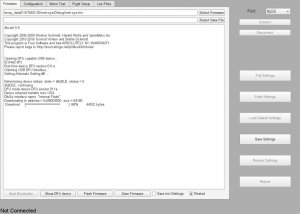
ich habe hier https://github.com/nichtgedacht/mini-sys ein komplettes
Projekt für OpenSTM32 System Workbench (http://www.openstm32.org) hin
gelegt.
Das Projekt lässt sich auf Knopfdruck installieren und ist für mich die
Grundlage für alles weitere. Der original Code für das LCD stammt wie
der übrige hinzugefügte Code aus den Firmware Repos von STM für den
STM32F4xx und den STM32F1xx soweit es das Display und die SD-Card betrifft.
Diesen Code habe ich stark verbessert, so dass man 1. Display beliebig drehen kann
und 2. mehr der Chip vom Display die Arbeit macht. Da der initiale Code für die
Peripherie der MCU mit CubeMX erzeugt wurde, kann man damit auch weiterhin
die Konfiguration verändern. Dieses Tool und die IDE sind auch für Linux erhältlich
und beide sehr einfach zu installieren und kostenlos.
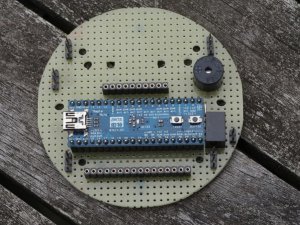
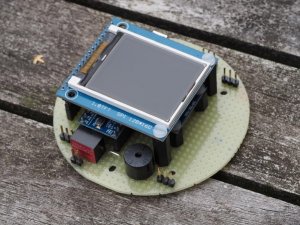
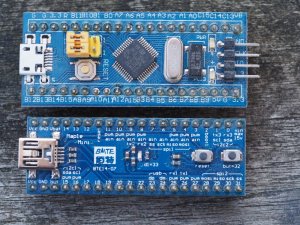
Als Hardware eignet sich eins dieser billigen Boards "STM32 minimum
development system" oder ein maple mini clone mit STM32F103CB und
eins dieser ST7735 gesteuerten Displays mit 128x160 Pixel und SD Karten Slot
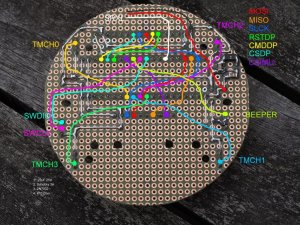
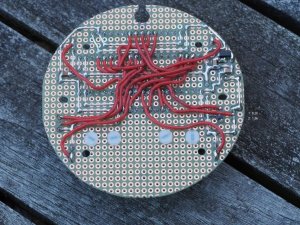
wie z.B das Teil von Adafruit oder ähnliche. Was man noch braucht sind ein
paar Drähte eine Lochrasterplatte, Buchsenleisten und ein ST-Link V2 Debug
Adapter, den man ebenfalls günstig bei ebay bekommt. Damit kann man
den Code bis runter auf Assemblerebene in Einzelschritten ablaufen lassen oder
eben auch die Software einfach nur hochladen.
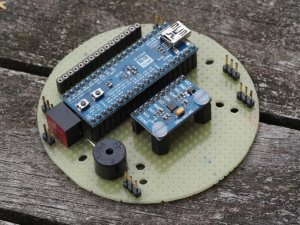
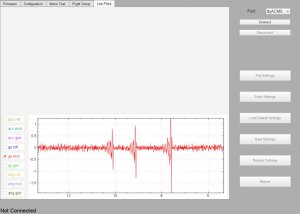
Als Sensoreinheit verwende ich ein Breakout Platinchen mit einer MPU-9250 IMU.
Darauf sind 3 Gyros, 3 Accelerometer und 3 Magnetsensoren.
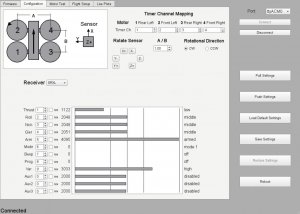
Der Empfänger von Jeti hat die Firmware mit Futaba S-Bus. Damit überträgt
das System 16 Känäle digital mit 2000 Steps pro Kanal in 17 ms.
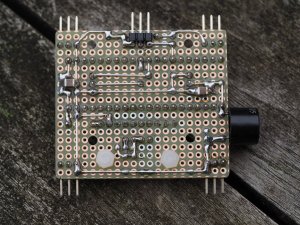
Inzwischen fliegt die Lochrasterplatine als Quadokopter in Racergröße der sich
durchaus zum rumheizen eignet. Dabei benutze ich bisher nur die Gyros
und fliege das Ding, wie bei Racern üblich, wie einen Hubschrauber.
Ich war Heute damit auf einem Modellflugplatz und man hat mir bestätigt, dass
das Teil sehr gut fliegt. Mir persönlich wackelt er in bestimmten Situationen
noch zu stark.
Ich würde mich freuen, wenn ich sich hier jemand findet der das Teil nachvollzieht
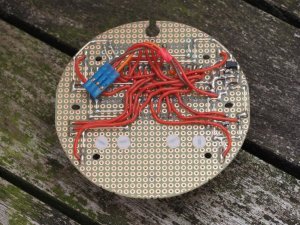
und verbessert. Die Hardwarekosten sind ja sehr überschaubar und die Platine ist
an einem Regentag zusammengelötet.
Der Rahmen auf dem Foto ist ein Teil für 8,5€ von Hobbyking. Mit 1000er 3s Akkus
fliegt der Kopter über 10 Min. bis die Spannung unter 10V geht.
Gruß
Dieter
.
ich hatte dieses Projekt bereits bei mikrocontroller.net und fpv-community.de vorgestellt.
Leider interessiert das dort niemanden. Jedenfalls kamen von dort keine Rückmeldungen.
ich habe hier https://github.com/nichtgedacht/mini-sys ein komplettes
Projekt für OpenSTM32 System Workbench (http://www.openstm32.org) hin
gelegt.
Das Projekt lässt sich auf Knopfdruck installieren und ist für mich die
Grundlage für alles weitere. Der original Code für das LCD stammt wie
der übrige hinzugefügte Code aus den Firmware Repos von STM für den
STM32F4xx und den STM32F1xx soweit es das Display und die SD-Card betrifft.
Diesen Code habe ich stark verbessert, so dass man 1. Display beliebig drehen kann
und 2. mehr der Chip vom Display die Arbeit macht. Da der initiale Code für die
Peripherie der MCU mit CubeMX erzeugt wurde, kann man damit auch weiterhin
die Konfiguration verändern. Dieses Tool und die IDE sind auch für Linux erhältlich
und beide sehr einfach zu installieren und kostenlos.
Als Hardware eignet sich eins dieser billigen Boards "STM32 minimum
development system" oder ein maple mini clone mit STM32F103CB und
eins dieser ST7735 gesteuerten Displays mit 128x160 Pixel und SD Karten Slot
wie z.B das Teil von Adafruit oder ähnliche. Was man noch braucht sind ein
paar Drähte eine Lochrasterplatte, Buchsenleisten und ein ST-Link V2 Debug
Adapter, den man ebenfalls günstig bei ebay bekommt. Damit kann man
den Code bis runter auf Assemblerebene in Einzelschritten ablaufen lassen oder
eben auch die Software einfach nur hochladen.
Als Sensoreinheit verwende ich ein Breakout Platinchen mit einer MPU-9250 IMU.
Darauf sind 3 Gyros, 3 Accelerometer und 3 Magnetsensoren.
Der Empfänger von Jeti hat die Firmware mit Futaba S-Bus. Damit überträgt
das System 16 Känäle digital mit 2000 Steps pro Kanal in 17 ms.
Inzwischen fliegt die Lochrasterplatine als Quadokopter in Racergröße der sich
durchaus zum rumheizen eignet. Dabei benutze ich bisher nur die Gyros
und fliege das Ding, wie bei Racern üblich, wie einen Hubschrauber.
Ich war Heute damit auf einem Modellflugplatz und man hat mir bestätigt, dass
das Teil sehr gut fliegt. Mir persönlich wackelt er in bestimmten Situationen
noch zu stark.
Ich würde mich freuen, wenn ich sich hier jemand findet der das Teil nachvollzieht
und verbessert. Die Hardwarekosten sind ja sehr überschaubar und die Platine ist
an einem Regentag zusammengelötet.
Der Rahmen auf dem Foto ist ein Teil für 8,5€ von Hobbyking. Mit 1000er 3s Akkus
fliegt der Kopter über 10 Min. bis die Spannung unter 10V geht.
Gruß
Dieter
.
Anhänge
-
 2016-06-17_17:22:30_1863_E-M10_SRGB-resized.jpg169,1 KB · Aufrufe: 55
2016-06-17_17:22:30_1863_E-M10_SRGB-resized.jpg169,1 KB · Aufrufe: 55 -
 2016-06-17_17:23:02_1864_E-M10_SRGB-resized.jpg143,7 KB · Aufrufe: 51
2016-06-17_17:23:02_1864_E-M10_SRGB-resized.jpg143,7 KB · Aufrufe: 51 -
 2016-06-17_17:24:48_1865_E-M10_SRGB-resized.jpg76,6 KB · Aufrufe: 72
2016-06-17_17:24:48_1865_E-M10_SRGB-resized.jpg76,6 KB · Aufrufe: 72 -
 2016-06-14_17:25:29_1860_E-M10_SRGB-resized.jpg131,7 KB · Aufrufe: 65
2016-06-14_17:25:29_1860_E-M10_SRGB-resized.jpg131,7 KB · Aufrufe: 65 -
 2016-06-12_22:18:43_1856_E-M10_SRGB-crop.jpg86,6 KB · Aufrufe: 61
2016-06-12_22:18:43_1856_E-M10_SRGB-crop.jpg86,6 KB · Aufrufe: 61 -
 2016-06-12_22:18:43_1856_E-M10_SRGB-resized.jpg117,3 KB · Aufrufe: 46
2016-06-12_22:18:43_1856_E-M10_SRGB-resized.jpg117,3 KB · Aufrufe: 46


 :rolleyes:") )
)




")