Nicht doch...
Nicht doch...
")
Aber es wird sich wie immer alles länger hinziehen als gedacht.
Platine ist bis auf ein paar Feinheiten praktisch fertig entwickelt...aber der Prof des Leiterplattenlabores ist bis Mitte Mai im Urlaub
Also erstmal Bremse
-->Weil SMD auf Lochraster ist doch recht unpraktisch
@Helmut:
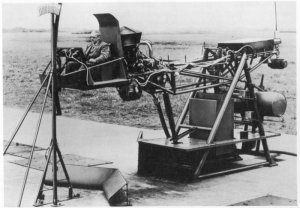
Den Effekt den du beschrieben hast kann man an meinem Versuchsaufbau sehr schön nachvollziehen.
-Wenn man ein Brett langsam von hinten annähert kommt es zuerst zu einer Schubsteigerung. Bei zunehmend geringerem Abstand aber geht dieser Effekt wieder zurück. Das alles zwar in geringem Rahmen (bei Deiner Grafik sinds ja auch max. 20%) aber merklich.
-Der ganze Aufbau ist um die Nickachse träger als ich dachte...von daher hoffe ich z.Z. schon dass das modulationstechnisch machbar ist!
Meld mich wieder sobald es was neues gibt
PS. hab jetzt sogar einen BL samt Regler. da kann ich auf den Akku als Gegengewicht vielleicht verzichten
Nicht doch...
Sick Duck schrieb:Ich denke mal, dass es hier einige gibt, die auf Deine Ergebnisse gespannt sind, André. Laß uns nicht dumm sterben!
Duck
Aber es wird sich wie immer alles länger hinziehen als gedacht.
Platine ist bis auf ein paar Feinheiten praktisch fertig entwickelt...aber der Prof des Leiterplattenlabores ist bis Mitte Mai im Urlaub
Also erstmal Bremse
-->Weil SMD auf Lochraster ist doch recht unpraktisch
@Helmut:
Den Effekt den du beschrieben hast kann man an meinem Versuchsaufbau sehr schön nachvollziehen.
-Wenn man ein Brett langsam von hinten annähert kommt es zuerst zu einer Schubsteigerung. Bei zunehmend geringerem Abstand aber geht dieser Effekt wieder zurück. Das alles zwar in geringem Rahmen (bei Deiner Grafik sinds ja auch max. 20%) aber merklich.
-Der ganze Aufbau ist um die Nickachse träger als ich dachte...von daher hoffe ich z.Z. schon dass das modulationstechnisch machbar ist!
Meld mich wieder sobald es was neues gibt
PS. hab jetzt sogar einen BL samt Regler. da kann ich auf den Akku als Gegengewicht vielleicht verzichten
")
 ist ja aber auch nicht zum verkaufen.
ist ja aber auch nicht zum verkaufen.