Hallo Nils,
Du kannst es Dir vielleicht nicht vorstellen, aber es gelten für den Gyrocopter mit 2 Rotoren folgende (überprüfte) Regeln:
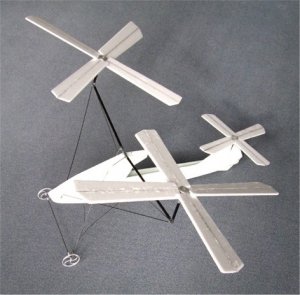
1. Die Drehrichtung der Rotoren im Vorwärtsflug ist idealerweise (Flugstabilität) für den linken Rotor links herum, für den rechten Rotor rechts herum. Alle gutfliegenden Gyrocopter mit 2 oder 4 Rotoren berücksichtigen das.
2. Im Gegensatz zum Hubschrauber, wo die Rotorblätter in Drehrichtung nach oben angestellt sind, um Auftrieb zu erzeugen, ist es beim Gyrocopter genau umgekehrt: Die Rotorblättervorderkanten zeigen in Drehrichtung nach unten. Das ist nicht weiter verwunderlich, wenn man bedenkt, das bei einer Positionierung der Rotorachse ein Anstellwinkel von ca. 7-9 Grad gewählt wird und die Rotoren so schräg von unten (in Flugrichtung) angeströmt werden.
3. Im Rückwärtsflug (nicht Rückenflug) bleibt die Drehrichtung beider Rotoren erhalten, d. h., die durch dynamische Schwerpunktverlagerung bewirkte Flugrichtungsänderung wirkt sich nicht auf die aus dem Vorwärtsflug gegebene Drehrichtung der Rotoren aus. Denen ist es - was ihre Drehrichtung angeht - egal, ob sie im Vorwärtsflug von unten oder im Rückwärtsflug von unten angeströmt werden, Hauptsache, sie werden von unten angeströmt.
Ein Gyrotor mit 2 oder mehr Rotoren, der auch rückwärts fliegen kann, ist aus meiner Sicht realisierbar, wenn sein Schwerpunkt im Fluge für die gewünschte Flugrichtungsänderung verschoben werden kann, und seine Steuerung durch eine 3D Zug- oder Schubvektorsteuerung übernommen wird.
Bautechnisch dürfte das z. B. mit einer 180Grad Schwenkvorrichtung kein Problem sein.
Anders verhält es sich, wenn man mit einem Gyrokopter Rückenflug praktizieren will:
Da jetzt -in Rückenlage- die Rotoren nicht mehr von Ihrer Unterseite, sondern von ihrer Oberseite angeströmt werden, müssen Sie zwangsläufig ihre Drehrichtung ändern. Auch kehrt sich die stabilisierende Pendelwirkung (Schwerpunkt liegt tief unterhalb der Rotorebene, vergleichbar einem Hochdecker-Flächenflugzeug) in ihr Gegenteil: Der Schwerpunkt liegt jetzt weit oberhalb der Rotorebene, die stabilisierende Pendelwirkung fehlt, qußerdem drehen die Rotoren nicht mehr von innen nach außen sondern von außen nach innen, ein zusätzliches Handicap bei der Erlangung einer stabilen Fluglage.
Einen Gyrocopter senkrecht (wie einen Helicopter) steigen zu lassen halte ich aus den oben beschriebenen Gründen für unmöglich, da der Gyrocopter nur mit der Vortriebskraft des Motors in Rotoranströmungsrichtung fliegen kann.
Wenn die Zugachse des Motors auf der gleichen Ebene liegen würde wie die Rotorachsen, verliert der Gyrotor seine Stabilität. Er kann nicht auf der Stelle senkrecht nach oben schweben :-))
Wer baut den ersten Gyrocopter
-der stabil vorwärts und rückwärts fliegt und seine Flugrichtung im Fluge ändern kann?
-der stabil auf dem Rücken fliegen kannt?
Strengt Euch an.... :-))) !
Grüße
Peter (brushless)

")


 Könnte man da mit nach oben gerichteter Motorleistung entgegenwirken?
Könnte man da mit nach oben gerichteter Motorleistung entgegenwirken?
 .Aber man könnte den Motor ja so stark schwenken, dass er quasi einen Senkrechtstart ermöglicht. Dann könnte man auch in der Luft stehen bleiben und einfach in die andere Richtung weiterfliegen-is aber eher ein bisschen Träumerei
.Aber man könnte den Motor ja so stark schwenken, dass er quasi einen Senkrechtstart ermöglicht. Dann könnte man auch in der Luft stehen bleiben und einfach in die andere Richtung weiterfliegen-is aber eher ein bisschen Träumerei