Guten Morgen zusammen
Ist ja ein bisschen unfair, ein analoges gegen ein digtailes Servo antreten zu lassen.
")
...
Nö, das ist nicht unfair, sondern nur der Versuch, zahlreiche Spekulationen über Unterschiede in den Servoqualitäten auf einen durch Fakten erhärteten Boden zu stellen.
... Wobei es ja die MPX 3030 auch nicht mehr im Laden gibt. Interessant wäre, wie sich z.B die Royal M-Link ausmacht.
Ja, die Frage hatte ich selbst schon weiter oben angeregt. Mangels Hardware kann ich das nicht prüfen. Aber im Kern geht es um genau diese Fragestellung.
10 bit (1024 Schritte Auflösung), 11bit (2048 Schritte Auflösung) machen bei solchen Servos keinen Unterschied. Was wohl einen Unterschied ausmacht, ist die Sender-interne Rechengenauigkeit. Die kann, wie obiger Test zeigt, schlechter als die Servogenauigkeit sein. Und deshalb wäre es tatsächlich sehr spannend, eine Vergleichsmessung mit einer modernen Anlage zu sehen...
... Könntest du noch mal den Testaufbau etwas genauer beschreiben?...
Klar doch:
Mechanischer Aufbau nach Rudolf Fiala: 57,3 cm CFK-Stab auf den Servohebel mit CA geklebt und Meterstab als Messskala benutzt => 1mm = 0,1° Ausschlag. Alle Daten händisch aufgeschrieben, keine Digitalisierung.
Aufbau mit Sender: Testkanal auf Mischer mit 10%er Einmischung. Ist genügend gespreizt, dass das Servo durch senderseitige Verstellung des Nullpunktes (%-Schritte) in kleinen Schritten bewegt werden kann. Hiermit habe ich den Nullpunkt in einzelnen %-Schritte bewegt und jedesmal notiert, wenn eine kleine Bewegung am Servo ankam.
Aufbau ohne Sender: Versuch mit Conrad-Servotester ist mangels Auflösung gescheitert. Geholfen hat auch nicht, statt des gewöhnlichen 50K-Potis ein 5K-Poti mit Vorwiderstand einzulöten. Das führt zwar theoretisch zu einer erheblichen Spreizung. In der Praxis handelt man sich aber andere, für die Messung unbrauchbare Ungenauigkeiten ein.
Geholfen hat schließlich mein Hyperion E-Meter II. Hiermit kann man Meßzyklen frei programmieren, wenn auch nur in ganzen us-Schritten. Damit Test wie folgt:
Hysterese: Mehrere Datensätze angelegt, bei denen im 2sec-Takt zwischen zwei Werten hin und her geschaltet wird.
1.500us <=> 1.501us
1.500us <=> 1.502us
1.500us <=> 1.503us
usw.
Hab mit 1us Intervallbreite angefangen. Man konnte bei jedem Servo hören, dass sich da was tat. Aber es gab keine Bewegung am Hebelarm. Dann habe ich die Intervallbreite in 1us-Schritten solange erhöht, bis der Servohebelarm sichtbar eine hin und her Bewegung ausführte. Dies war dann mein Maß für die Hysterese.
Auflösung:
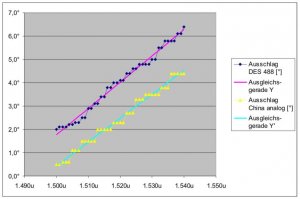
Als erstes habe ich das Verhältnis Pulsbreite/Servoausschlag ermittelt. Beim DES488 sind dies ca. 100° auf 1.000us Pulsbreitenänderung. Beim Cina-Vergleichsservo sind es ca. 90° auf 1.000us. Dies zur Skalierung aller folgenden Messwerte.
Meßzyklus für die Auflösung programmiert mit 1us-Schritten von 1.500us bis 1.540us in 1us-Schritten. Zwischen jedem Schritt 5sec Pause, um Zeit zum Ablesen und notieren zu haben.
Das war's dann auch schon. Der Rest war Handarbeit mit Übertrag der händisch aufgenommenen Messwerte in Excel. Statistik-Auswertung und graphische Darstellung.
Mir ist schon klar, dass das kein Versuchsaufbau mit Laborqualität ist. Aber das Ergebnis ist wohl nicht nur qualitativ, sondern auch quanitativ hinreichend gut für die wesentlichen Kernaussagen.
Ich hoffe, es gefällt.
Gruß,
Stefan