Das poti hat drei Anschlüsse: Anfang und Ende der Widerstandsbahn und Schleifer. Den Wert misst Du zwischen Anfang und Ende. Der Wert ist nicht wahninnig kritisch, da das Poti als Spannungsteiler geschaltet wird. Wenn du also 25 k misst und nur 10 k bekommst, dann wird das höchstwahrscheinlich auch funktionieren.kann den Widerstand ja messen von dem beigefügten Poti und das einfach als Lineares kaufen. Zum messen muss ich das Poti bis an Anschlag drehen und dann den maximalwert eines Anschlags messen, richtig ?
Du verwendest einen veralteten Browser. Es ist möglich, dass diese oder andere Websites nicht korrekt angezeigt werden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
Hubspindelsteuerung über linearpoti möglich ?
- Ersteller Hydrofoil
- Erstellt am
Hi
Die normalen Potis drehen im Servo aber nur 2 mal 45 ° bis 2 mal 60 ° , das ist der Regelbereich, es wird nicht der gesamte Weg genutzt.
Beim Linearen wird darum der Schlitten nur im Mittelbereich hin und her fahren.
Um den Weg zu vergrössern kann dann an den Aussenanschlüssen, mit Widerstand oder einstellbar mit Trimmpoti in reihe, angeglichen werden.
Es liegt natürlich auch an der Elektronik wie weit der Stellweg geht.
Gruß Aloys.
Die normalen Potis drehen im Servo aber nur 2 mal 45 ° bis 2 mal 60 ° , das ist der Regelbereich, es wird nicht der gesamte Weg genutzt.
Beim Linearen wird darum der Schlitten nur im Mittelbereich hin und her fahren.
Um den Weg zu vergrössern kann dann an den Aussenanschlüssen, mit Widerstand oder einstellbar mit Trimmpoti in reihe, angeglichen werden.
Es liegt natürlich auch an der Elektronik wie weit der Stellweg geht.
Gruß Aloys.
Servus Robert,
das mit dem Wert des Potis hat ja Markus schon richtig erklärt. Außerdem ist auf dem Poti meist der Wert aufgedruckt, 10k z.B.
Da die Servoelektronik höchstwahrscheinlich nicht den gesamten Weg des Potis ausnützt würde ich die Endschalter so justieren, das sie 5mm vor den mechanischen Endanschlägen des Potis ansprechen. Sie werden in Serie zum Motor geschaltet und unterbrechen einfach deren Stromkreis. So ist das Poti geschützt, im Fehlerfall steht der Motor und kann nur noch per Hand gedreht werden. Allerdings verlierst Du dann 10mm Weg. Wenn alles fehlerfrei läuft kannst du die Schalter auch weiter nach außen justieren um mehr nutzbaren Weg zu bekommen. Normalerweise sollten sie nie ansprechen!
Wenn Du möchstest zeichne ich Dir gerne einen Schaltplan wie alles zusammen geschaltet werden muss.
Grüße, steve
das mit dem Wert des Potis hat ja Markus schon richtig erklärt. Außerdem ist auf dem Poti meist der Wert aufgedruckt, 10k z.B.
Da die Servoelektronik höchstwahrscheinlich nicht den gesamten Weg des Potis ausnützt würde ich die Endschalter so justieren, das sie 5mm vor den mechanischen Endanschlägen des Potis ansprechen. Sie werden in Serie zum Motor geschaltet und unterbrechen einfach deren Stromkreis. So ist das Poti geschützt, im Fehlerfall steht der Motor und kann nur noch per Hand gedreht werden. Allerdings verlierst Du dann 10mm Weg. Wenn alles fehlerfrei läuft kannst du die Schalter auch weiter nach außen justieren um mehr nutzbaren Weg zu bekommen. Normalerweise sollten sie nie ansprechen!
Wenn Du möchstest zeichne ich Dir gerne einen Schaltplan wie alles zusammen geschaltet werden muss.
Grüße, steve
Hallo an alle,
ja gerne Steve, würde mich sehr freuen. Macht es doch wensentlich einfacher und billiger so ein Plan(sonst elektroschrott).
Habe nun das 10k linear Poti bestellt mit kleinster Baugrösse.
http://datasheet.octopart.com/EVANF3R15B14-Panasonic-datasheet-18673.pdf
Wegen den maximalen Verschiebebereich was Alloys anspricht....heisst das also das ich die 100mm verfahrweg des linearschiebers wohl ohne zusatzwiderstände nicht nutzen werden kann ? Was genau brauch ich da zum einstellen für ein Trimmpoti (Bezeichung, Widerstandswert)?
Wonach in Reihe ? Hab ja 3 Abgänge vom Poti. Wie geschrieben zwei Aussenanschüsse und den Schleiferkontakt selber. Wo kommt das Trimmpoti drann ? Vermute mal vor den Schleifer ???
Vielen Dank und einen schönen Freitag Abend euch allen.
Grüsse
Robert
ja gerne Steve, würde mich sehr freuen. Macht es doch wensentlich einfacher und billiger so ein Plan(sonst elektroschrott).
Habe nun das 10k linear Poti bestellt mit kleinster Baugrösse.
http://datasheet.octopart.com/EVANF3R15B14-Panasonic-datasheet-18673.pdf
Wegen den maximalen Verschiebebereich was Alloys anspricht....heisst das also das ich die 100mm verfahrweg des linearschiebers wohl ohne zusatzwiderstände nicht nutzen werden kann ? Was genau brauch ich da zum einstellen für ein Trimmpoti (Bezeichung, Widerstandswert)?
Wonach in Reihe ? Hab ja 3 Abgänge vom Poti. Wie geschrieben zwei Aussenanschüsse und den Schleiferkontakt selber. Wo kommt das Trimmpoti drann ? Vermute mal vor den Schleifer ???
Vielen Dank und einen schönen Freitag Abend euch allen.
Grüsse
Robert
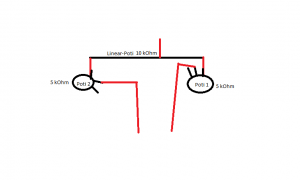
Nein. Zwei Potis, je als variabler Widerstand geschaltet (also Schleifer und ein Bahnende angeschlossen) in Serie an Anfang und Ende der Widerstandsbahn des Hauptpotis. Wert ca. die Hälfte des Hauptpotis, dann landest Du mit der Einstellung irgendwo zwischen ein drittel und der Hälfte.Wo kommt das Trimmpoti drann ? Vermute mal vor den Schleifer ???
Hallo Markus,
hab mal ein Bild deiner Idee gemacht. Ist das so richtig mit den 5 kOhm Drehwiderständen(Poti) und dem haupt-Linear-Poti ?
Würde den Poti dann nehmen.
http://www.conrad.ch/goto.php?artikel=422568
oder
http://www.conrad.ch/goto.php?artikel=430854
Ist das von den Leistungsdaten (Watt, etc. ) ok oder gibts was auszusetzen ?
Grüsse
Robert
hab mal ein Bild deiner Idee gemacht. Ist das so richtig mit den 5 kOhm Drehwiderständen(Poti) und dem haupt-Linear-Poti ?
Würde den Poti dann nehmen.
http://www.conrad.ch/goto.php?artikel=422568
oder
http://www.conrad.ch/goto.php?artikel=430854
Ist das von den Leistungsdaten (Watt, etc. ) ok oder gibts was auszusetzen ?
Grüsse
Robert
Anhänge
Hallo an alle,
habe nun das 10cm Linear Poti, mit der Servoelektronik und den zwei(4) externe( 2 je in reihe, um statt 5 Ohm bis zu 10Ohm einstellen zu können je Seite) potis fürs Endanschlag einstellen eingebaut.
An sich funktionert das alles nun wunderbar(mache noch ein Video die Tage).
ABER: Im Bereich um die Mittellage fährt er nicht exakt zurück. Also wenn ich den Fernsteuerhebel auf Neutral lege, läuft der Schlitten in einen Bereich von 2-3cm um die Mittelage. Er ist immer irgendwo in dem Bereich von 2-3cm, aber nie einigerMassen exakt.
Ihr hattet geschrieben, das das wohl mit der Leichtläufigkeit der Spindel zusammen hängen könnte. Die geht schon recht leicht. Aber anscheinend nicht leicht genug^.
Gibt es eine Möglichkeit den spindel-Motor mehr Kraft um die Mittellage zu geben, das er die Mittelage des Schlittens möglichst exakt ansteuert ? Bisher kriecht er nur da hin, wie gesagt, recht ungenau.
Habt ihr eine Idee oder einen Tipp ?
Ich danke euch allen schon einmal.
Viele Grüsse
Robert
habe nun das 10cm Linear Poti, mit der Servoelektronik und den zwei(4) externe( 2 je in reihe, um statt 5 Ohm bis zu 10Ohm einstellen zu können je Seite) potis fürs Endanschlag einstellen eingebaut.
An sich funktionert das alles nun wunderbar(mache noch ein Video die Tage).
ABER: Im Bereich um die Mittellage fährt er nicht exakt zurück. Also wenn ich den Fernsteuerhebel auf Neutral lege, läuft der Schlitten in einen Bereich von 2-3cm um die Mittelage. Er ist immer irgendwo in dem Bereich von 2-3cm, aber nie einigerMassen exakt.
Ihr hattet geschrieben, das das wohl mit der Leichtläufigkeit der Spindel zusammen hängen könnte. Die geht schon recht leicht. Aber anscheinend nicht leicht genug^.
Gibt es eine Möglichkeit den spindel-Motor mehr Kraft um die Mittellage zu geben, das er die Mittelage des Schlittens möglichst exakt ansteuert ? Bisher kriecht er nur da hin, wie gesagt, recht ungenau.
Habt ihr eine Idee oder einen Tipp ?
Ich danke euch allen schon einmal.
Viele Grüsse
Robert
Hi
Da über das Poti und die Einstellpotis ja der Steuerstrom fliesst, fürchte ich das bei fast 20 kOhm nun alles zu hochomig ist.
Die Elektronik bekommt zwar die richtige Spannung, aber der Basisstrom ist zu gering um den Motor mit ausreichendem Strom zu versorgen.
Er sollte wenn das richtig ist, immer, egal aus welcher Richtung kommend, VOR der Mitte stehen bleiben, da im der Strom aus geht.
Abhilfe ein zusatz-Transistor, der für mehr Strom sorgt ?
Gruß Aloys.
Sonst fällt mir grade nichts anderes ein!
Da über das Poti und die Einstellpotis ja der Steuerstrom fliesst, fürchte ich das bei fast 20 kOhm nun alles zu hochomig ist.
Die Elektronik bekommt zwar die richtige Spannung, aber der Basisstrom ist zu gering um den Motor mit ausreichendem Strom zu versorgen.
Er sollte wenn das richtig ist, immer, egal aus welcher Richtung kommend, VOR der Mitte stehen bleiben, da im der Strom aus geht.
Abhilfe ein zusatz-Transistor, der für mehr Strom sorgt ?
Gruß Aloys.
Sonst fällt mir grade nichts anderes ein!
comicflyer
User
Keine Servoelektronik. Einfach einen alten Bürstenfahrtregler (kein Flugregler!
Schiff- oder Autoregler mit Vor/Rück) nehmen und das Poti für die Mittelstellung
entsprechend ersetzen (Schieb-, 10Gang,...), evtl. mit Getriebe
unter-/übersetzen um auf die Gangzahl zu kommen. Ein 10-Gang-Poti
wär da auch genau richtig. Oder das Poti über einen kleinen Riemenantrieb
mitnehmen (Skalenband oÄ).
CU Eddy
Schiff- oder Autoregler mit Vor/Rück) nehmen und das Poti für die Mittelstellung
entsprechend ersetzen (Schieb-, 10Gang,...), evtl. mit Getriebe
unter-/übersetzen um auf die Gangzahl zu kommen. Ein 10-Gang-Poti
wär da auch genau richtig. Oder das Poti über einen kleinen Riemenantrieb
mitnehmen (Skalenband oÄ).
CU Eddy
Hallo an alle,
Hier nun das Video wie versprochen.
http://www.youtube.com/watch?v=2gb_sdCqhFw
Wie gesagt, funktioniert ja, nur mit dem Fehler das es um die Mitte nicht genug power hat um zurück zu kommen.
@Aloys: Vielen Dank für deine Ideen. Ja, der Widerstand ist nun wohl um die ~8 kOhm zusätzlich pro Seite. Die 5 kOhm haben nicht gereicht um bis ganz an die Endanschläge zu kommen. Was meinst du mit Zusatztransistor für mehr Strom ? Kann ich das einfach irgendwo in die Steuerleitung bei mir einschleifen, was bewirkt dieser Transistor genau ? Was genau bräuchte ich da ? Irgendwie ein Link zu dem Bauteil wäre gut, hab damit wie gesagt wenig Ahnung worauf man da achten muss bei den Elektroischen Bauteilen.
Anbei auch ein Bild von der Servoeletronik mit den Potis oben drauf huckepack, um die Endanschläge einstellen zu können.
Viele Grüsse
Robert
Hier nun das Video wie versprochen.
http://www.youtube.com/watch?v=2gb_sdCqhFw
Wie gesagt, funktioniert ja, nur mit dem Fehler das es um die Mitte nicht genug power hat um zurück zu kommen.
@Aloys: Vielen Dank für deine Ideen. Ja, der Widerstand ist nun wohl um die ~8 kOhm zusätzlich pro Seite. Die 5 kOhm haben nicht gereicht um bis ganz an die Endanschläge zu kommen. Was meinst du mit Zusatztransistor für mehr Strom ? Kann ich das einfach irgendwo in die Steuerleitung bei mir einschleifen, was bewirkt dieser Transistor genau ? Was genau bräuchte ich da ? Irgendwie ein Link zu dem Bauteil wäre gut, hab damit wie gesagt wenig Ahnung worauf man da achten muss bei den Elektroischen Bauteilen.
Anbei auch ein Bild von der Servoeletronik mit den Potis oben drauf huckepack, um die Endanschläge einstellen zu können.
Viele Grüsse
Robert
Anhänge
Problem ist meiner Meinung die geringe Steilheit(Empfindlichkeit) des Reglers, dh. in der Nähe des Sollposition wird zu wenig Strom an den Motor gegeben, um die Sollposition ganz zu erreichen. Wenn die Differenz zw. Ist- und Solposition größer ist, dann läuft der Motor ja auch kraftvoll. Ohne Schaltplan von der Servoelektronik wird man aber schwerlich den Verstärkungsfaktor beeinflussen können.
Durch die Spreizung des Stellbereichs wird natürlich auch die Totzone und der Proportionalbereich um den Sollwert herum Breiter. Kräftigere Endstufe sollte schon helfen, aber ideal ist eine Servoelektronik, die in diesen Parametern konfigurierbar ist.Sonst fällt mir grade nichts anderes ein!
Heisst das also,
a.) ich muss mit dem weichen Mittelpunkt leben ?
b.) Dieser Verstärker ist allein zusätzlich geht nicht ?
c.) Ohne Eingriff in die Servoelektronik selbst nichts weiter verbesserbar ?
Ich danke euch das es immerhin einigermassen geht und funktioiert. Allein hätte ich das nicht so hinbekommen.
Grüsse
Robert
a.) ich muss mit dem weichen Mittelpunkt leben ?
b.) Dieser Verstärker ist allein zusätzlich geht nicht ?
c.) Ohne Eingriff in die Servoelektronik selbst nichts weiter verbesserbar ?
Ich danke euch das es immerhin einigermassen geht und funktioiert. Allein hätte ich das nicht so hinbekommen.
Grüsse
Robert
Hallo Robert,
ich würde mal testweise einen höher untersetzen Getriebemotor einsetzen. Mit einem Motor , der die maximale Spannung der Servoelektronik ausnutzt und die maximale elektrische Leistung besser in mechanische umsetzen kann. Da wäre ein 12V Motor mit 3S Lipo das richtige.
Bei Conrad gibt es eine Serie von Getriebemotoren mit allen erdenklichen Untersetzungen, vielleicht ist da ja was geeignetes dabei.
Einfach in die Suche "Getriebemotor" eingeben und es kommen jede Menge in Frage kommende Motore, z.B:
GETRIEBEMOTOR 6:1 4,5-15V 385ER MOTOR
Das Getriebe gibts auch noch mit 540er Motor...
Grüße, steve
ich würde mal testweise einen höher untersetzen Getriebemotor einsetzen. Mit einem Motor , der die maximale Spannung der Servoelektronik ausnutzt und die maximale elektrische Leistung besser in mechanische umsetzen kann. Da wäre ein 12V Motor mit 3S Lipo das richtige.
Bei Conrad gibt es eine Serie von Getriebemotoren mit allen erdenklichen Untersetzungen, vielleicht ist da ja was geeignetes dabei.
Einfach in die Suche "Getriebemotor" eingeben und es kommen jede Menge in Frage kommende Motore, z.B:
GETRIEBEMOTOR 6:1 4,5-15V 385ER MOTOR
Das Getriebe gibts auch noch mit 540er Motor...
Grüße, steve
Hallo Steve,
vielen Dank für deinen Tipp. Müsste halt den vorhandenen Motor ersetzen. Aber der wiegt halt nur 66g....das ist halt schon recht wichtig das Gewicht. Das conrad Teil hat schon 150g fast auf der Waage.
Hmm, aber der Weg über mehr installiertes Drehmoment ist an sich sicher nicht verkehrt. Werde mal überlegen wie man das bei gleichem Gewicht machen könnte. Zur Not muss ich den vorhandenen Motor weiter untersetzen. Aber dann wirds halt langsammer...das auch wieder schlecht. Soll ja innerhalb von 1-2sec die 10cm verfahren.
Grüsse
Robert
vielen Dank für deinen Tipp. Müsste halt den vorhandenen Motor ersetzen. Aber der wiegt halt nur 66g....das ist halt schon recht wichtig das Gewicht. Das conrad Teil hat schon 150g fast auf der Waage.
Hmm, aber der Weg über mehr installiertes Drehmoment ist an sich sicher nicht verkehrt. Werde mal überlegen wie man das bei gleichem Gewicht machen könnte. Zur Not muss ich den vorhandenen Motor weiter untersetzen. Aber dann wirds halt langsammer...das auch wieder schlecht. Soll ja innerhalb von 1-2sec die 10cm verfahren.
Grüsse
Robert
Hallo Robert,
probier doch mal, ob nicht evtl. das Verringern des Widerstandswertes das Problem lösen könnte. Dazu müsstest Du zum Testen einfach nur zwei Widerstände (z.B. je 4,7kOhm) parallel zum Poti anschließen. Damit wird zwar auch der Stellweg verändert, aber Du würdest schon sehen, ob das Regelverhalten "härter" wird. Wenn's so funktioniert, versuchst Du ein Linearpoti mit einem kleineren Widerstandswert zu bekommen.
Grüße,
Otti
probier doch mal, ob nicht evtl. das Verringern des Widerstandswertes das Problem lösen könnte. Dazu müsstest Du zum Testen einfach nur zwei Widerstände (z.B. je 4,7kOhm) parallel zum Poti anschließen. Damit wird zwar auch der Stellweg verändert, aber Du würdest schon sehen, ob das Regelverhalten "härter" wird. Wenn's so funktioniert, versuchst Du ein Linearpoti mit einem kleineren Widerstandswert zu bekommen.
Grüße,
Otti