MiniMag Senkrechtstarter
MiniMag Senkrechtstarter
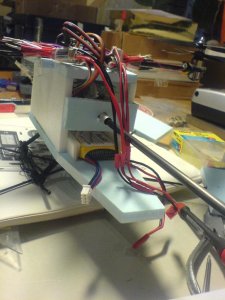
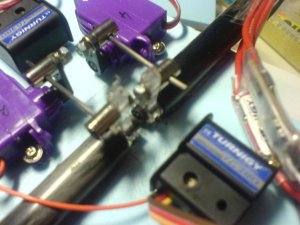
Natürlich kann das jeder Nachbauen und für Fragen stehe ich auch gerne zur Verfügung. Die Fotos zeigen eigentlich alles, und im Text steht der Rest. Ich habe halt zum Schwenken zwei getrennte Servos verwendet, welche über einen Flächenkreisel angesteuert werden und so die Stäbilität in Längsrichtung gewehren. Am zweiten Flächenkreisel sind die Regler angesteckt; somit bleibt er auch über die Querachse stabil. Um Seitenruder im Stand zu steuern braucht man nun nur einen Motor etwas nach vorne und den anderen nach hinten zu steuern, und schon dreht sich die Maschine im Stand. Die Motoren(Drehachse) ist knapp vor dem Schwerpunkt, sodaß man beim Fliegen kein Problem mit Schwanzlastigkeit hat. Am meisten Arbeit machte die Programmierung bzw. Beimischungen.
Beste Grüße Andy
MiniMag Senkrechtstarter
Natürlich kann das jeder Nachbauen und für Fragen stehe ich auch gerne zur Verfügung. Die Fotos zeigen eigentlich alles, und im Text steht der Rest. Ich habe halt zum Schwenken zwei getrennte Servos verwendet, welche über einen Flächenkreisel angesteuert werden und so die Stäbilität in Längsrichtung gewehren. Am zweiten Flächenkreisel sind die Regler angesteckt; somit bleibt er auch über die Querachse stabil. Um Seitenruder im Stand zu steuern braucht man nun nur einen Motor etwas nach vorne und den anderen nach hinten zu steuern, und schon dreht sich die Maschine im Stand. Die Motoren(Drehachse) ist knapp vor dem Schwerpunkt, sodaß man beim Fliegen kein Problem mit Schwanzlastigkeit hat. Am meisten Arbeit machte die Programmierung bzw. Beimischungen.
Beste Grüße Andy
") auch bei wind! generell hilft ein kreisel nix, wenn die auslegung nicht stimmt, mehr will ich damit auch nicht sagen. bei mir reichen ein nick- und ein rollkreisel, wenn jemand selbst ein vtol bauen will, sollte er die geringen mehrkosten der nickrotoren verkraften können (und das Gewicht der nickrotoren kompensiert sich im Schwebeflug ja durch deren schub).
auch bei wind! generell hilft ein kreisel nix, wenn die auslegung nicht stimmt, mehr will ich damit auch nicht sagen. bei mir reichen ein nick- und ein rollkreisel, wenn jemand selbst ein vtol bauen will, sollte er die geringen mehrkosten der nickrotoren verkraften können (und das Gewicht der nickrotoren kompensiert sich im Schwebeflug ja durch deren schub).