Hallo community.
ich suche einen Außenläufer (10 pol.) der mit einem Reisenauer Super Chief 6:1 Getriebe (Spant bereits eingebaut) in einer PS-Swift 2.8 betrieben werden soll.
Folgende Konfiguration soll erreicht werden:
Prop soll ein 20x13 oder 23x13 werden - 20x13 wird vermutlich besser sein, da der Motor noch über genug Drehmoment verfügen muss um nicht nur Standschub zu leisten? Vielleicht ist das aber auch nur eine falsche Annahme von mir und der 23x13 wäre in jedem Fall besser?
6S 5000mAh 45C Akku an einem YGE Saphir 125 (bereits vorhanden) - der auch gerne kurzzeitig mit 140A betrieben werden könnte.
Durch die niederohmige Wicklung könnte auch kurzzeitig höherer Strom als spezifiziert durch den Motor geschickt werden?
(Anspielung auf die Dauerleistungswerte einiger Scorpion Heli Motoren 4020 z.B.) - der Motor wird ja nur einige Sekunden eingeschaltet (ähnlich Hotliner Betrieb)
Motorwelle muss 5mm Durchmesser haben für das SuperChief 6:1 Getriebe; das Getriebe ist für 3000Watt spezifiziert. Das soll möglichst die Zielleistung vom Motor sein.
Motorgewicht sollte max ~ 300g sein (PeggyPepper Equivalent)
Kann jemand von Euch die entsprechende Propdrehzahl und resultierend die benötigte KV errechnen) um in einem optimalen Betriebsbereich für eine möglichst hohe Steigrate zu liegen? bzw. anders formuliert? Ist eine möglichst hohe KV auch automatisch für dieses Setup sinnvoll/machbar?
Die Frage ist natürlich auch, inwiefern die Werte in den Kalkulatoren auch mit der Realität übereinstimmen / tatsächlich gemessen worden sind.
Scorpion habe ich nichts passendes gefunden, das könnte aber sicher gewickelt werden?
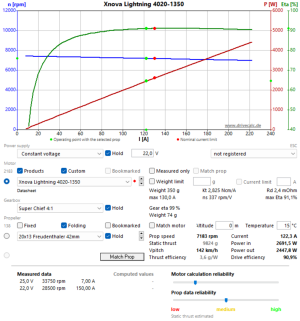
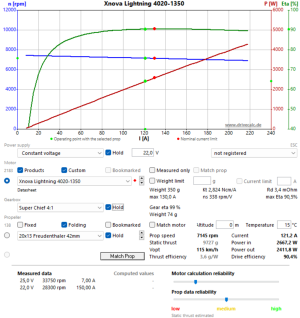
XNova hätte ich einen 4020 1350kv gefunden, der zwar 350g Gewicht hat, aber 2600W bis 3200W Peak an 6S hätte.
Was meinen die Experten unter Euch zu meiner Anfrage?
Gibts einen Scorpion (Peggy ist ja auch Scorpion. allerdings 6 pol und nicht 10 pol) der entsprechend gewickelt werden könnte?
Danke
Gruß
Christian
ich suche einen Außenläufer (10 pol.) der mit einem Reisenauer Super Chief 6:1 Getriebe (Spant bereits eingebaut) in einer PS-Swift 2.8 betrieben werden soll.
Folgende Konfiguration soll erreicht werden:
Prop soll ein 20x13 oder 23x13 werden - 20x13 wird vermutlich besser sein, da der Motor noch über genug Drehmoment verfügen muss um nicht nur Standschub zu leisten? Vielleicht ist das aber auch nur eine falsche Annahme von mir und der 23x13 wäre in jedem Fall besser?
6S 5000mAh 45C Akku an einem YGE Saphir 125 (bereits vorhanden) - der auch gerne kurzzeitig mit 140A betrieben werden könnte.
Durch die niederohmige Wicklung könnte auch kurzzeitig höherer Strom als spezifiziert durch den Motor geschickt werden?
(Anspielung auf die Dauerleistungswerte einiger Scorpion Heli Motoren 4020 z.B.) - der Motor wird ja nur einige Sekunden eingeschaltet (ähnlich Hotliner Betrieb)
Motorwelle muss 5mm Durchmesser haben für das SuperChief 6:1 Getriebe; das Getriebe ist für 3000Watt spezifiziert. Das soll möglichst die Zielleistung vom Motor sein.
Motorgewicht sollte max ~ 300g sein (PeggyPepper Equivalent)
Kann jemand von Euch die entsprechende Propdrehzahl und resultierend die benötigte KV errechnen) um in einem optimalen Betriebsbereich für eine möglichst hohe Steigrate zu liegen? bzw. anders formuliert? Ist eine möglichst hohe KV auch automatisch für dieses Setup sinnvoll/machbar?
Die Frage ist natürlich auch, inwiefern die Werte in den Kalkulatoren auch mit der Realität übereinstimmen / tatsächlich gemessen worden sind.
Scorpion habe ich nichts passendes gefunden, das könnte aber sicher gewickelt werden?
XNova hätte ich einen 4020 1350kv gefunden, der zwar 350g Gewicht hat, aber 2600W bis 3200W Peak an 6S hätte.
Was meinen die Experten unter Euch zu meiner Anfrage?
Gibts einen Scorpion (Peggy ist ja auch Scorpion. allerdings 6 pol und nicht 10 pol) der entsprechend gewickelt werden könnte?
Danke
Gruß
Christian