Hallo community,
hier ein kurzer Zwischenbericht der vergangenen Wochen, da ich leider nicht all zu viel Zeit hatte und das Wetter auch nicht immer so wollte ich ich es gebraucht hätte :-)
Der XNova 4020-1250kv hat auf dem Reisenauer Super Chief Getriebe 4:1 sitz gemacht und in der Swift Platz genommen.
Der Flansch musste zuvor noch aufgebohrt werden, da der Spannring der Welle des Motors zu groß war und daher der Motor nicht auf den Flansch geschraubt werden konnte. Die Feinpositionierung des Motorritzels im Planetengetriebe war leider eine mühsame Spielerei, ich hätte es mir das einfacher vorgestellt einen sauberen Getriebelauf zu erhalten.. nun ja, jetzt passt es und ich komme zum wesentlichen.
Ein SLS 5000mAh 30C der knapp 2 Jahre alt ist und vermutlich um die 50-70 Zyklen drauf hat, sollte das System befeuern. Der Akku ist noch hart, hat einen sehr guten Innenwiderstand, insbesondere wenn dieser für diese Versuche per Heizkoffer vorgewärmt ist.
Als Regler habe ich einen YGE Saphir 125A LVT im Einsatz.
Beim langsamen Hochlaufen bis Vollgas mit GM 20x13S zeigt die Telemetrie 163A am Regler und resultiert letztlich in einem Strömungsabriss (furchtbares dröhnen in den Ohren, wenn man daneben steht um das Modell zu halten) der Drehmoment ist so heftig das es bereits zwei Mal die Verschraubung zwischen Motorflansch und Getriebe gelöst hat, dieses Feingewinde wurde wirklich fest angezogen und nun mit Schraubensicherung mittelfest verklebt.
Beim dritten Versuch (gestern) hat alles gepasst, die Swift wurde zum Start geworfen, ein volles hochfahren des Motors war nicht mehr möglich, 193A hat die Telemetrie gemeldet, der YGE bei späterer Diagnose Überstrom und hat abgeschaltet (definierte Stromgrenze im Regler 180A - diese könnte nach oben verschoben werden).
Die 193A sind wahrscheinlich dadurch entstanden, das es diesmal das Feingewinde am oberen Ende des Getriebes gelöst hat beim Planetenträger. Auch dieses habe ich jetzt mit Mittelfest gesichert und ordentlich angezogen.
Die Swift ist glücklicherweise gut gelandet, da ich in den größeren Modellen immer einen Stützakku (Tatu 2S 450mAh) verbaut habe, nachdem mir mal ein YGE ausgestiegen ist und der Empfänger resettet hat - das Modell lag am Boden. Eine Klärung warum welche Komponente einen Reset hatte, konnte nicht geklärt werden.
Nun folgen weitere Versuche mit 18x13S oder sogar 17x13 und mit 4S Akku zum testen um zu sehen bei wieviel Strom wir enden und dann das Ergebnis hochrechnen können.
Die 20x13S zieht jedenfalls zu viel an dem Motor, da dieser derart niederohmig ist.. Glücklicherweise ist der Akku mit seinen 30C im Prinzip am Ende bzw. nicht niederohmig genug, sonst wären es vermutlich noch mehr Leistung.
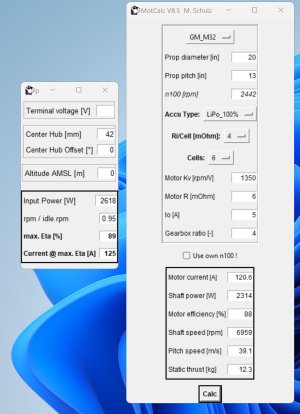
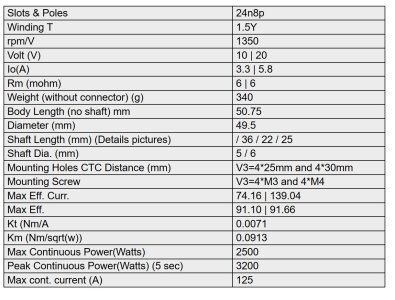
Das zeigt aber wieder das alle Tools und theoretischen Berechnungen nur bedingt zur Motordimensionierung nutzbar. Auch sind die kv der einzelnen Hersteller mit Vorsicht zu genießen - manche geben diese unter Volllast an, andere im Leerlauf.. da ist auch gleich ein Unterschied bis zu 20% im Strom.
Ich melde mich wieder..