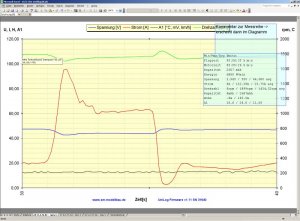
okay - dann kannst du mir ja ganz sicher erklären, warum die drehzahl (trotz steigender spannung) einbricht, wenn am ende des steigfluges der pitch und damit die motor- und stellerlast reduziert wird
bei sowas kann ich auch nur mutmaßen.
die frage sollte einer von kontronik besser beantworten können.
ich habe mir aber nach vielen logs eine meinung gebildet über die drehzahlregelung.
für mich ist das so:
kurze strompeaks kann der regler nicht ausregeln, da reaktionszeit zu langsam.
es kann auch sein, daß er sich einfach "verschluckt", aus welchen gründen auch immer.
(ähnlich wie das "aus dem takt kommen" bei booten)
drehzahleinbrüche von ~50upm sind oft nicht zu vermeiden, auch bei geringer last kann das auftreten.
dazu kommt noch der drehzahlsensor, der auch eine gewisse ungenauigkeit hat.
und weil die drehzhal über die motorleitung gemessen wird, kann der regler da auch viel durcheinanderbringen.
was der jive auf die phasen haut bei schlagartiger lastabnahme weiß man nicht so genau.
besser ist drehzhal am kopf magnetisch messen.
zu dem schluss kommt man einfach, wenn man sich ein paar logs genau ankukt, von anfang bis ende.
der gezeigte log hat deshalb wenig aussagekraft, weil er die tatsächliche leistung des motors nicht zeigt. (drehzahlsteifigkeit)
bei 45V und 60% regleröffnung verhält sich jeder motor so.
wenn man also die drehzhalsteifigkeit zeigen will, muss man den motor an sein limit bringen.
und da das im heli nicht mit strom zu schaffen ist, muss man sich die drehzahl bei weniger spannung ankuken.
die stromspitze spielt dabei aber auch eine rolle.
wie gesagt, manchmal bricht es auch bei 50A ein.
ich stelle bald einige log-auschnitte rein mit normalen drehzahlverhalten und nicht normalen verhalten.
die nicht normalen einbrüche sind für mich aber mittlerweile selbstverständlich.
das ist halt meine meinung.
aber ich bin offen für neues.
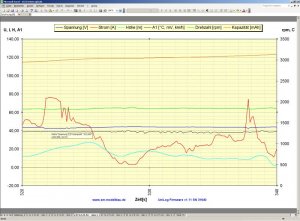
hier log von pirouetten.
sehr schnelle kurze strompeaks.
egal ob 40A oder 70A, die einbrüche sind die selben. (gute 50upm)
das kriegt der regler einfach nicht hin.
 ... und den Motor interessiert es nicht !!
... und den Motor interessiert es nicht !!")



") Man muß schon sehr genau schauen, um überhaupt noch lichte Stellen zu entdecken...
Man muß schon sehr genau schauen, um überhaupt noch lichte Stellen zu entdecken...

 :rolleyes:")