Du verwendest einen veralteten Browser. Es ist möglich, dass diese oder andere Websites nicht korrekt angezeigt werden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
Einstellung Fernsteuerungen
- Ersteller chris1
- Erstellt am
Gast_31212
User gesperrt
Hallo,
ich habe bei meiner DX10t diese Einstellungen von der DX18 übernommen und habe mehr Steuerweg als vorher mit der DX6i und dem Paramixer.
Die DX10t funktioniert so perfekt und zu vollster Zufriedenheit mit sehr viel Steuerweg.
Ob dies auch bei der DX9 so programmiert werden kann, weiß ich nicht.
http://www.rc-network.de/forum/show...nsteuerungen?p=3322765&viewfull=1#post3322765
ich habe bei meiner DX10t diese Einstellungen von der DX18 übernommen und habe mehr Steuerweg als vorher mit der DX6i und dem Paramixer.
Die DX10t funktioniert so perfekt und zu vollster Zufriedenheit mit sehr viel Steuerweg.
Ob dies auch bei der DX9 so programmiert werden kann, weiß ich nicht.
http://www.rc-network.de/forum/show...nsteuerungen?p=3322765&viewfull=1#post3322765
Jörn-Oliver
User
ich bin wieder aus dem Ausland zurück ( beruflich lange Zeit unterwegs gewesen ) Nach dem ich meinen Oxy 1.0 samt Sender verkauft habe, komm ich doch nicht von los, und bin momentan auf der Suche nach einem neuen, gebrauchten Paraglider, ich tendiere stark zum Hacker Free , alternativ noch der Oxy 1.5 ( falls jemand ein komplettes Set abgeben will, bitte Info an mich )
da ich definitiv nur einen Para und sonst keinen weiteren Flieger haben will, bin ich am überlegen, eine möglichst einfachen Sender dazu zu holen.
Ich bin beruflich viel unterwegs, daher wird alles meist in einem Rucksack transportiert, lange Schalter und Antennen deshalb etwas störend.
Ich bin jetzt auf die Multiplex SMART Anlage gestoßen, kommt genau dem Nahe was ich suche.
Hatt die schon mal jemand in Benutzung gehabt ? wie siehts mit Reichweite aus ? Benutzbarkeit im Para in Verbindung mit dem Paramixer ?
mfg, Jörn
da ich definitiv nur einen Para und sonst keinen weiteren Flieger haben will, bin ich am überlegen, eine möglichst einfachen Sender dazu zu holen.
Ich bin beruflich viel unterwegs, daher wird alles meist in einem Rucksack transportiert, lange Schalter und Antennen deshalb etwas störend.
Ich bin jetzt auf die Multiplex SMART Anlage gestoßen, kommt genau dem Nahe was ich suche.
Hatt die schon mal jemand in Benutzung gehabt ? wie siehts mit Reichweite aus ? Benutzbarkeit im Para in Verbindung mit dem Paramixer ?
mfg, Jörn
NieDa-Alpin
User
Hi Jörn,
ich fliege meine Gleitschirme mit der Smart und den Paramixer......funktioniert auch im Gebirge bei voller Reichweite einwandfrei.
Habe mir wegen des geringen Platzbedarf und der einfachen Programierung die Steuerung gekauft.
Einsatz nunmehr seit knapp 3 Jahren.
ich fliege meine Gleitschirme mit der Smart und den Paramixer......funktioniert auch im Gebirge bei voller Reichweite einwandfrei.
Habe mir wegen des geringen Platzbedarf und der einfachen Programierung die Steuerung gekauft.
Einsatz nunmehr seit knapp 3 Jahren.
Jörn-Oliver
User
Super, ist doch mal ne Aussage..
muss nur noch ein neuer "gebrauchter" Paraglider her..")
mfg, Jörn
muss nur noch ein neuer "gebrauchter" Paraglider her..
mfg, Jörn
macmurphy05
User
Hallo
Ich bin nun auch Besitzer eines RC-Free und habe schon einige Flüge hinter mich gebracht.
Nun würde ich gerne über einen Poti die Bremse einstellen, so das man nicht ständig am Höhenknüppel ziehen muss.
Ich habe eine MPX-Royal Pro 7 und den Para-Mix. Den Poti würde ich gerne auf F oder alternativ auf E legen. Ich fliege Mode 2. Ich teste nun schon den gesamten Vormittag.
Ich bedanke mich schon mal.
macmurphy
Ich bin nun auch Besitzer eines RC-Free und habe schon einige Flüge hinter mich gebracht.
Nun würde ich gerne über einen Poti die Bremse einstellen, so das man nicht ständig am Höhenknüppel ziehen muss.
Ich habe eine MPX-Royal Pro 7 und den Para-Mix. Den Poti würde ich gerne auf F oder alternativ auf E legen. Ich fliege Mode 2. Ich teste nun schon den gesamten Vormittag.
Ich bedanke mich schon mal.
macmurphy
NieDa-Alpin
User
Beim Thermik-Flug ist es durchaus vom vorteil leicht angebremst zu fliegen, da durch wird das Profil mehr gewölbt und erzeugt bis zu einem gewissen Punkt einen höheren Auftrieb.....
Wenn ich mit meiner großen Anlage flieg, habe ich einen Dreistufen-Schalter für diese Aufgabe damit belegt.
Wenn ich mit meiner großen Anlage flieg, habe ich einen Dreistufen-Schalter für diese Aufgabe damit belegt.
macmurphy05
User
Ganz genau, beim Thermikfliegen hilft die Bremse.
Ich helfe mir nun erstmal damit aus, das ich an der Funke die Trimmung am Höhenknüppel verstelle.
Ich würde gerne eine elegantere Lösung finden aber egal was ich probiere, funzt nicht. Hatte gestern schon einen netten Chat mit einem wissenden Mitglied. Nur zu Weihnachten will ich ihn damit nicht zu sehr nerven.
Vielleicht fällt mir die Lösung ja bald selber ein. (Bezweifle ich aber )
)
Oder jemand anderes kann mir helfen.
Frohes Fest
Oliver
Ich helfe mir nun erstmal damit aus, das ich an der Funke die Trimmung am Höhenknüppel verstelle.
Ich würde gerne eine elegantere Lösung finden aber egal was ich probiere, funzt nicht. Hatte gestern schon einen netten Chat mit einem wissenden Mitglied. Nur zu Weihnachten will ich ihn damit nicht zu sehr nerven.
Vielleicht fällt mir die Lösung ja bald selber ein. (Bezweifle ich aber
)Oder jemand anderes kann mir helfen.
Frohes Fest
Oliver
macmurphy05
User
Servus Pillepit
Habe ich auch schon versucht aber es hat nicht geklappt. Vielleicht streikt das wegen dem ParaMixer, oder bei mir zwischen den Ohren ist ein Streik.
Ich kann die Flugphasen zwar aktivieren aber ich kann keine Werte eingeben.
Wenn nur jemand eine Datei hätte zum überspielen auf die Funke.....
Im Moment behelfe ich mich eben wie oben beschrieben.
Oliver
Habe ich auch schon versucht aber es hat nicht geklappt. Vielleicht streikt das wegen dem ParaMixer, oder bei mir zwischen den Ohren ist ein Streik.
Ich kann die Flugphasen zwar aktivieren aber ich kann keine Werte eingeben.
Wenn nur jemand eine Datei hätte zum überspielen auf die Funke.....
Im Moment behelfe ich mich eben wie oben beschrieben.
Oliver
Gleiderheidelberg
User
Multiplex
Multiplex
vielleicht hat Frank von Karorace ein Datei für dich
er hat auf jedenfall mit Multiplex und RC Gleitschirm was am Hut
Vielleicht kann er dir weiterhelfen
http://www.rc-paragliding.de/fernsteuerungen.html
Multiplex
vielleicht hat Frank von Karorace ein Datei für dich
er hat auf jedenfall mit Multiplex und RC Gleitschirm was am Hut
Vielleicht kann er dir weiterhelfen
http://www.rc-paragliding.de/fernsteuerungen.html
KaroRace de
User
Einstellungen MPX
Einstellungen MPX
Hallo Michael
ja ich hatte mir Oliver schon ausführlich Kontakt . Es bedarf eines MPX Überspielkabel um die Datei aufzuspielen.
Die Einstellungen kann ich nicht abschreiben da vieles vor Weihnachten ausverkauft ist. Fernsteuerungen und einige Schirmgrößen sind ein beliebtes Weihnachtsgeschenk geworden.
viele Grüße
Frank
Einstellungen MPX
Hallo Michael
ja ich hatte mir Oliver schon ausführlich Kontakt . Es bedarf eines MPX Überspielkabel um die Datei aufzuspielen.
Die Einstellungen kann ich nicht abschreiben da vieles vor Weihnachten ausverkauft ist. Fernsteuerungen und einige Schirmgrößen sind ein beliebtes Weihnachtsgeschenk geworden.
viele Grüße
Frank
Gleiderheidelberg
User
Dann ist er ja in guten Händen.
Schones Fest.
Schones Fest.
KaroRace de
User
Moin..was für ein Kabel wird denn benötigt?
Um vom pc auf die funke zugreifen zu können?
Ralf
Hallo Ralf
es ist der Artikel 85148
Dieses Kabel wird benötigt, um die Sender ROYALpro, Cockpit SX und zukünftige Sender an einen PC anzuschließen. Die Sender werden über die serienmäßig integrierte Multifunktionsbuchse (Ladebuchse) mit dem PC verbunden.
Mit der geeigneten Software stehen die Funktionen Update, Backup (Datensicherung) und Modellspeicher-Übertragung (nur Cockpit SX) zur Verfügung. Die Software gibt es zum kostenlosen Download im Downloadbereich unter Software.
ROYALpro: ROYALpro DataManager
ROYALevo: ROYALevo DataManager
Cockpit SX: Cockpit SX DataManager
Lieferumfang: PC-Kabel mit USB-Stecker
Hinweise:
• Zum Betrieb der ROYALevo mit dem USB-PC-Kabel # 8 5148 ist der ROYALevo DataManager ab V2.x erforderlich.
• Für ältere Sender (Cockpit MM, PROFI mc 4000) nicht geeignet.
• Das USB-PC-Kabel ist nicht für Simulatorbetrieb geeignet.
viele Grüße
Frank
AMBER Specs
User
Spektrum DX9 volle Servowege gelöst!
Spektrum DX9 volle Servowege gelöst!
Moin Zusammen
da ich mir mutig vom Christkind ne DX9 besorgt habe
und nun Stundenarbeit programmiert habe kann ich heute
schreiben; 'Yes - es klappt'
Und es ist gar nicht mal so schwer ...Wenn man den Bogen draußen hat.
Habe gar das Vario schon aktiviert und werde demnächst
berichten. Da ich aktuell anderweitig beschäftigt bin,
Bitte ich noch um Geduld um eine ordentliche Beschreibung posten zu können.
Sonntagsgrüße'
Matthias
Spektrum DX9 volle Servowege gelöst!
Moin Zusammen
da ich mir mutig vom Christkind ne DX9 besorgt habe
und nun Stundenarbeit programmiert habe kann ich heute
schreiben; 'Yes - es klappt'
Und es ist gar nicht mal so schwer ...Wenn man den Bogen draußen hat.
Habe gar das Vario schon aktiviert und werde demnächst
berichten. Da ich aktuell anderweitig beschäftigt bin,
Bitte ich noch um Geduld um eine ordentliche Beschreibung posten zu können.
Sonntagsgrüße'
Matthias
fluegschueler
User
MX-20
MX-20
Ich möchte euch gerne an dieser Stelle eine etwas andere Variante vorstellen, wie man die MX-20 für unsere Gleitschirme programmieren kann. Die kleine wissenschaftliche Abhandlung lässt sich nicht vermeiden.
Zunächst ein paar Abkürzungen und 2 Belegungsdefinitionen:
QR = Querruder
QRKn = Querruder-Knüppel
HR = Höhenruder
HRKn = Höhenruder-Knüppel
S2 = Servo Kanal 2
S3 = Servo Kanal 3
Servo 2 = rechter Arm
Servo 3 = linker Arm
Kurz vorweg noch mal die Ziele, die meiner Meinung nach bei anderen Programmierungen nicht alle erreicht wurden:
1: für die Armbewegungen soll bei S2 und S3 der volle Weg von -100% bis +100% ausgenutzt werden
2: in QRKn-Mittelstellung sollen S2 und S3 auf -100% stehen
3: bei QRKn links der Mitte wird S3 proportional dem Knüppelweg in der linken Hälfte bewegt, Mitte bis linker Anschlag entspricht -100% bis +100%, rechts der Mitte bleibt S3 auf -100%
3: bei QRKn rechts der Mitte wird S2 proportional dem Knüppelweg in der rechten Hälfte bewegt, Mitte bis rechter Anschlag entspricht -100% bis +100% , links der Mitte bleibt S2 auf -100%
5: wird HRKn gezogen, so bewegen sich S2 und S3 proportional dem Knüppelweg in der unteren Hälfte, Mitte bis unterer Anschlag entspricht -100% bis +100%
6: die Ergebisse von QR und HR werden addiert für die endgültigen Servostellungen
Die Herausforderung besteht darin, dass
a: beim QR 2 Servos getrennt angesteuert werden müssen, je nachdem ob der Knüppel in der linken oder rechten Hälfte ist
b:beim HR 2 Servos gleichzeitig angesteuert werden müssen
c: die Servos bei QR und HR einen Weg von 200% (-100% bis +100%) zurücklegen müssen, um so den vollen Servoweg zu nutzen
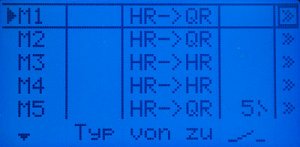
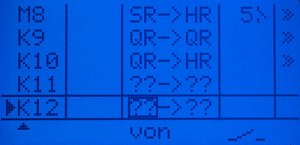
Die Lösung liegt darin, alle Automatismen der MX-20 abzuschalten und alles mit den vorhanden Mischern zu realisieren. Im folgenden verweise ich auf die jeweiligen Screenshots der MX-20. Folgende Einstellung führen zum Ziel:
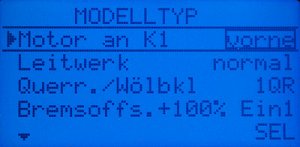
1: "Modelltyp.jpg", den Type "Fläche" setze ich voraus, mit diesen Einstellungen macht die MX-20 nichts mehr von selbst
2: "Mischer1-4.jp", die Mischer 1 bis 4 erzeugen die Bremse, also beide Arme nach unten. Benötigt wird ein Steuerbereich von -100% bis -100%. Dies ist mit einem Trick möglich. Dazu werden 2 identische Mischer pro Servo definiert. Beide Mischer fahren einen Weg von 0% bis 100% ab. Somit gibt es nun ein Summensignal von 0% bis 200%. Pro Servo natürlich, Mischer 1 und 2 bilden ein Paar und geben das Ergebnis auf den logischen Kanal QR, Mischer 3 und 4 das zweite Paar und geben das Ergebnis auf den logischen Kanal HR.
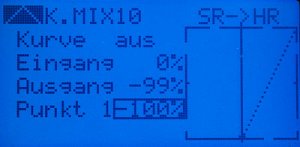
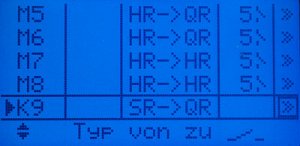
3: "Mischer9-10.jpg", Mischer 9 und 10 sind trivial und sind zuständig für die Lenkbewegung. Mischer 9 gibt über die Kurve "Mix9.jpg" den physikalischen Kanal QR auf den logischen Kanal QR. Mischer 10 gibt über die Kurve "Mix10.jpg" den physikalischen Kanal QR auf den logischen Kanal QR. Beide Kurven verwenden den selben Trick und fahren nur in ihrer Hälfte den logischen Kanal von -100% bis +100%
4: Nicht abgebildet (weil trivial) sind die nötigen Servowegbegrenzungen von 100% zu beiden Seiten.
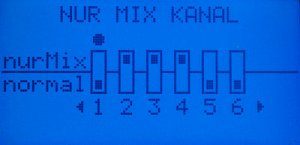
5: "NurMix.jpg", hier werden physikalische und logische Kanäle voneinander getrennt. Wem die zufällige Namensgleichheit von physikalischen und logischen Kanälen zu verwirrend ist, kann auch andere logische Kanäle verwenden, muss sie nur entsprechend dem Senderausgang zuweisen.
Mischer 1 und 2 und 9 summieren sich auf dem logischen Kanal QR. In Neutralstellung steht der logische Kanal QR auf -100% durch den Mixer 9. Das HR durchläuft die Werte 0 bis 200, gemixt ergibt dies einen Anschlagwert von 100% und alle Zwischenwerte. Gibt man nun eine Lenkbewegung, so würde der Wert größer 100% werden, daher ist die Servobegrenzung wichtig.
Mit Mixer 5 bis 8 habe ich einen Notausschalter definiert (S5), der unabhängig von den Knüppelstellungen den Motor ausschaltet und die Servos auf 100% fährt (Arme liegen an). Das Prinzip ist das gleiche wie oben, einen konstant hohen Wert in die logischen Kanäle QR und HR zu mixen ("Mix5-8.jpg").
Nicht ganz trivial, dafür alle Servos mit echten 200% Weg.
Michael
MX-20
Ich möchte euch gerne an dieser Stelle eine etwas andere Variante vorstellen, wie man die MX-20 für unsere Gleitschirme programmieren kann. Die kleine wissenschaftliche Abhandlung lässt sich nicht vermeiden.
Zunächst ein paar Abkürzungen und 2 Belegungsdefinitionen:
QR = Querruder
QRKn = Querruder-Knüppel
HR = Höhenruder
HRKn = Höhenruder-Knüppel
S2 = Servo Kanal 2
S3 = Servo Kanal 3
Servo 2 = rechter Arm
Servo 3 = linker Arm
Kurz vorweg noch mal die Ziele, die meiner Meinung nach bei anderen Programmierungen nicht alle erreicht wurden:
1: für die Armbewegungen soll bei S2 und S3 der volle Weg von -100% bis +100% ausgenutzt werden
2: in QRKn-Mittelstellung sollen S2 und S3 auf -100% stehen
3: bei QRKn links der Mitte wird S3 proportional dem Knüppelweg in der linken Hälfte bewegt, Mitte bis linker Anschlag entspricht -100% bis +100%, rechts der Mitte bleibt S3 auf -100%
3: bei QRKn rechts der Mitte wird S2 proportional dem Knüppelweg in der rechten Hälfte bewegt, Mitte bis rechter Anschlag entspricht -100% bis +100% , links der Mitte bleibt S2 auf -100%
5: wird HRKn gezogen, so bewegen sich S2 und S3 proportional dem Knüppelweg in der unteren Hälfte, Mitte bis unterer Anschlag entspricht -100% bis +100%
6: die Ergebisse von QR und HR werden addiert für die endgültigen Servostellungen
Die Herausforderung besteht darin, dass
a: beim QR 2 Servos getrennt angesteuert werden müssen, je nachdem ob der Knüppel in der linken oder rechten Hälfte ist
b:beim HR 2 Servos gleichzeitig angesteuert werden müssen
c: die Servos bei QR und HR einen Weg von 200% (-100% bis +100%) zurücklegen müssen, um so den vollen Servoweg zu nutzen
Die Lösung liegt darin, alle Automatismen der MX-20 abzuschalten und alles mit den vorhanden Mischern zu realisieren. Im folgenden verweise ich auf die jeweiligen Screenshots der MX-20. Folgende Einstellung führen zum Ziel:
1: "Modelltyp.jpg", den Type "Fläche" setze ich voraus, mit diesen Einstellungen macht die MX-20 nichts mehr von selbst
2: "Mischer1-4.jp", die Mischer 1 bis 4 erzeugen die Bremse, also beide Arme nach unten. Benötigt wird ein Steuerbereich von -100% bis -100%. Dies ist mit einem Trick möglich. Dazu werden 2 identische Mischer pro Servo definiert. Beide Mischer fahren einen Weg von 0% bis 100% ab. Somit gibt es nun ein Summensignal von 0% bis 200%. Pro Servo natürlich, Mischer 1 und 2 bilden ein Paar und geben das Ergebnis auf den logischen Kanal QR, Mischer 3 und 4 das zweite Paar und geben das Ergebnis auf den logischen Kanal HR.
3: "Mischer9-10.jpg", Mischer 9 und 10 sind trivial und sind zuständig für die Lenkbewegung. Mischer 9 gibt über die Kurve "Mix9.jpg" den physikalischen Kanal QR auf den logischen Kanal QR. Mischer 10 gibt über die Kurve "Mix10.jpg" den physikalischen Kanal QR auf den logischen Kanal QR. Beide Kurven verwenden den selben Trick und fahren nur in ihrer Hälfte den logischen Kanal von -100% bis +100%
4: Nicht abgebildet (weil trivial) sind die nötigen Servowegbegrenzungen von 100% zu beiden Seiten.
5: "NurMix.jpg", hier werden physikalische und logische Kanäle voneinander getrennt. Wem die zufällige Namensgleichheit von physikalischen und logischen Kanälen zu verwirrend ist, kann auch andere logische Kanäle verwenden, muss sie nur entsprechend dem Senderausgang zuweisen.
Mischer 1 und 2 und 9 summieren sich auf dem logischen Kanal QR. In Neutralstellung steht der logische Kanal QR auf -100% durch den Mixer 9. Das HR durchläuft die Werte 0 bis 200, gemixt ergibt dies einen Anschlagwert von 100% und alle Zwischenwerte. Gibt man nun eine Lenkbewegung, so würde der Wert größer 100% werden, daher ist die Servobegrenzung wichtig.
Mit Mixer 5 bis 8 habe ich einen Notausschalter definiert (S5), der unabhängig von den Knüppelstellungen den Motor ausschaltet und die Servos auf 100% fährt (Arme liegen an). Das Prinzip ist das gleiche wie oben, einen konstant hohen Wert in die logischen Kanäle QR und HR zu mixen ("Mix5-8.jpg").
Nicht ganz trivial, dafür alle Servos mit echten 200% Weg.
Michael
Anhänge
-
 NurMix.jpg16,7 KB · Aufrufe: 106
NurMix.jpg16,7 KB · Aufrufe: 106 -
 Modelltyp.jpg21,9 KB · Aufrufe: 104
Modelltyp.jpg21,9 KB · Aufrufe: 104 -
 Mix10.jpg19,4 KB · Aufrufe: 105
Mix10.jpg19,4 KB · Aufrufe: 105 -
 Mix9.jpg20 KB · Aufrufe: 95
Mix9.jpg20 KB · Aufrufe: 95 -
 Mix5-8.jpg19,8 KB · Aufrufe: 117
Mix5-8.jpg19,8 KB · Aufrufe: 117 -
 Mix1-4.jpg18,6 KB · Aufrufe: 100
Mix1-4.jpg18,6 KB · Aufrufe: 100 -
 Mischer5-8.jpg22,5 KB · Aufrufe: 108
Mischer5-8.jpg22,5 KB · Aufrufe: 108 -
 Mischer1-4.jpg21 KB · Aufrufe: 97
Mischer1-4.jpg21 KB · Aufrufe: 97 -
 Mischer9-10.jpg21,3 KB · Aufrufe: 115
Mischer9-10.jpg21,3 KB · Aufrufe: 115
Ähnliche Themen
- Antworten
- 28
- Aufrufe
- 3K
- Antworten
- 1
- Aufrufe
- 1K
- Antworten
- 7
- Aufrufe
- 12K
- Antworten
- 2
- Aufrufe
- 5K