Du verwendest einen veralteten Browser. Es ist möglich, dass diese oder andere Websites nicht korrekt angezeigt werden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
Ardupirates Hexacopter
- Ersteller Norf
- Erstellt am


Hexacopter fliegt nicht
Hexacopter fliegt nicht
Hallo zusammen.
Hier scheint sich etwas zu bewegen super !")
Dann hau ich gleich mal das nächste Problem in die Runde.
Hexa ist konfiguriert und funktioniert soweit. Jedoch kann ich nicht starten da mir das Ding sofort nach vorne wegkippt.
Auf dem kleinen Kästchen mit den weissen Schaltern hab ich 1 und 2 nach unten 3 und 4 oben.
Verwende ne Kamerahalterung die ebenfalls stabilisiert wird.
Anbei die werte von CLI
Wenn ich den Hexa einschalte leuchtet die Grüne Lampe A konstant. Sobald ich starte blinkt die Grüne Lampe A . B und C sind zuschaltbar via Fernsteuerung.
Kann mir jemand helfen ?
Gruss Tino
Hexacopter fliegt nicht
Hallo zusammen.
Hier scheint sich etwas zu bewegen super !
Dann hau ich gleich mal das nächste Problem in die Runde.
Hexa ist konfiguriert und funktioniert soweit. Jedoch kann ich nicht starten da mir das Ding sofort nach vorne wegkippt.
Auf dem kleinen Kästchen mit den weissen Schaltern hab ich 1 und 2 nach unten 3 und 4 oben.
Verwende ne Kamerahalterung die ebenfalls stabilisiert wird.
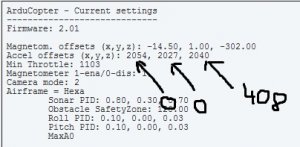
Anbei die werte von CLI
Code:
ArduCopter - Current settings
-----------------------------
Firmware: 2.01
Magnetom. offsets (x,y,z): -14.50, 1.00, -302.00
Accel offsets (x,y,z): 2054, 2027, 2040
Min Throttle: 1103
Magnetometer 1-ena/0-dis: 1
Camera mode: 2
Airframe = Hexa
Sonar PID: 0.80, 0.30, 0.70
Obstacle SafetyZone: 120.00
Roll PID: 0.10, 0.00, 0.03
Pitch PID: 0.10, 0.00, 0.03
MaxA0Wenn ich den Hexa einschalte leuchtet die Grüne Lampe A konstant. Sobald ich starte blinkt die Grüne Lampe A . B und C sind zuschaltbar via Fernsteuerung.
Kann mir jemand helfen ?
Gruss Tino
hallo leute,
nachdem ich und 321mir nun lange probiert haben ist wenigstens ein kleiner erfolg im sicht
die motoren haben sich schon etwas gedreht muß aber alles noch richtig konfigurieren
ich werde jetzt erst das mit der Sprache versuchen und dann ist genug für heute den rest versuche ich morgen
danke an alle die gelofen haben
mfg dado
nachdem ich und 321mir nun lange probiert haben ist wenigstens ein kleiner erfolg im sicht
die motoren haben sich schon etwas gedreht muß aber alles noch richtig konfigurieren
ich werde jetzt erst das mit der Sprache versuchen und dann ist genug für heute den rest versuche ich morgen
danke an alle die gelofen haben
mfg dado
Configurator Z Achse
Configurator Z Achse
Noch ein kleiner Nachtrag zu meinem Post.
Hab ja geschrieben das mir der Hexa sofort nach vorne wegkippt sobald ich Ihn starten möchte.
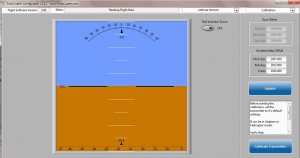
Habe im Configurator gesehen das die Z Achse hier einen Wert von ca 400 ausgibt in Waagerechtem zustand. Stelle ich nun den Hexa senkrecht ist dieser Wert 0.
Ist das evtl. ein Problem ? Habe die Beschleunigungssensoren mehrmals initialisiert immer mit diesem Ergebnis.
Anbei ein Printscreen des besagten:
Configurator Z Achse
Noch ein kleiner Nachtrag zu meinem Post.
Hab ja geschrieben das mir der Hexa sofort nach vorne wegkippt sobald ich Ihn starten möchte.
Habe im Configurator gesehen das die Z Achse hier einen Wert von ca 400 ausgibt in Waagerechtem zustand. Stelle ich nun den Hexa senkrecht ist dieser Wert 0.
Ist das evtl. ein Problem ? Habe die Beschleunigungssensoren mehrmals initialisiert immer mit diesem Ergebnis.
Anbei ein Printscreen des besagten:
Anhänge

hi tino,
hast du das ding kalibriert? geht über CLI. und immer schön an den CLI-schalter denken.
zur grün blinkenden LED kann ich grad nix sagen.
z-achse wert null ist normal, wenn du ihn senkrecht stellst.
sollte das bild mit 0,0,408 noch drin sein, vergiss es. kann es nicht löschen. es ist bei mir noch zu sehen, obwohl ich die antwort so geändert habe, dass man es nicht sehen sollte.
wollte es rausnehmen, da es falsch ist.
hier ein video(in HD ansehen, damit man alles lesen kann):
er macht mehrere einstellungen. video ganz ansehen!!! kalibrierung kommt zum schluß.
hast du das ding kalibriert? geht über CLI. und immer schön an den CLI-schalter denken.
zur grün blinkenden LED kann ich grad nix sagen.
z-achse wert null ist normal, wenn du ihn senkrecht stellst.
sollte das bild mit 0,0,408 noch drin sein, vergiss es. kann es nicht löschen. es ist bei mir noch zu sehen, obwohl ich die antwort so geändert habe, dass man es nicht sehen sollte.
wollte es rausnehmen, da es falsch ist.
hier ein video(in HD ansehen, damit man alles lesen kann):
er macht mehrere einstellungen. video ganz ansehen!!! kalibrierung kommt zum schluß.
Anhänge
Zuletzt bearbeitet von einem Moderator:
Geändert von Eckart Müller (19.04.2011 um 08:55 Uhr) Grund: Videos können direkt ins Posting "integriert" werden!
ich weiß,
nur leider kann man die hier wichtige info nur sehen, wenn man das video in voller größe und HD abspielt.
@dado,
vergiss das bild mit 0,0,408!!
@321mir
Du must in der Config Software schauen ob wenn Du den Copter gerade hinstellst, der künstliche Horizont gerade aungezeigt wird.
Wenn nicht must Du Die ACC Werte trimmen, indem Du im Configurator im linken Auswahlfeld "Flight Data " und im rechten Auswahlfeld "Calibration".
Dann msut Du in den weissen Kästchen unter Accelerometer Offset Andere Werte eintragen und auf Update klicken bis Die ACC Werte für Roll und Pitch auf 0 stehen und der Wert für Z auf 408 oder 0 (kanns aber im Moment nicht testen weil der Copter im Auto meiner Frau steht und die ist damit unterwegs).
Dann sollte im künstlichen Horizont auch alles gerade stehen.
Wenn das dann so ist, kippt der Copter auch nicht mehr um.
Ich hoffe ich habs verständlich hinbekommen :-) Ich bin da nämlich auch nur mit Hilfe drauf gekommen.
Gruß Sven
Du must in der Config Software schauen ob wenn Du den Copter gerade hinstellst, der künstliche Horizont gerade aungezeigt wird.
Wenn nicht must Du Die ACC Werte trimmen, indem Du im Configurator im linken Auswahlfeld "Flight Data " und im rechten Auswahlfeld "Calibration".
Dann msut Du in den weissen Kästchen unter Accelerometer Offset Andere Werte eintragen und auf Update klicken bis Die ACC Werte für Roll und Pitch auf 0 stehen und der Wert für Z auf 408 oder 0 (kanns aber im Moment nicht testen weil der Copter im Auto meiner Frau steht und die ist damit unterwegs).
Dann sollte im künstlichen Horizont auch alles gerade stehen.
Wenn das dann so ist, kippt der Copter auch nicht mehr um.
Ich hoffe ich habs verständlich hinbekommen :-) Ich bin da nämlich auch nur mit Hilfe drauf gekommen.
Gruß Sven
so ,,, ich hatte gerade die ersten kurtz flüge, leider noch nicht so erfolgreich
ich hab das gleich problem das du oben beschreibst, das werde ich morgen neu einstellen
leider ist auch etwas kapput gegangen bei einer bruchlandung das ich aber morgen gleich reparieren werde
ich hab videos gemach ich werde versuchen die heute abend auf vimeo zu posten, leider keine gute qualität da vom iphone.
danke und grüße dado
ich hab das gleich problem das du oben beschreibst, das werde ich morgen neu einstellen
leider ist auch etwas kapput gegangen bei einer bruchlandung das ich aber morgen gleich reparieren werde
ich hab videos gemach ich werde versuchen die heute abend auf vimeo zu posten, leider keine gute qualität da vom iphone.
danke und grüße dado
Einstellungen des Gyros
Einstellungen des Gyros
Hallo
Danke für deine Antwort fraggle10 . Hier stimmt bereits schon alles.
Unten angefügt ein Printscreen vom künstlichen Horizont.
Das scheint alles I.O zu sein. Stimmt die Verdrahtung der Motoren laut dem Hexa Pirates Schema ? Pin 5 und 6 oder 4 und 5 sind für die Kamerastabilisierung ?
Was hast du am kleinen schwarzen Kästchen eingestellt ? Da hats so weisse Schalter von 1-4 die man nach oben oder unten schalten kann.
Ich weis auch nicht was ich falsch mache. Die Software gibt alles sauber aus, auch wenn ich Ihn bewege. Die Kalibration nach Videoanleitung habe ich vorab gemacht da stimmt auch alles.
Ich habe die ganze Platine auf Formschaumtapes gelagert genau so wie man dies z.B bei einem Gyro von einem Heli macht.
Gruss Tino
Einstellungen des Gyros
Hallo
Danke für deine Antwort fraggle10 . Hier stimmt bereits schon alles.
Unten angefügt ein Printscreen vom künstlichen Horizont.
Das scheint alles I.O zu sein. Stimmt die Verdrahtung der Motoren laut dem Hexa Pirates Schema ? Pin 5 und 6 oder 4 und 5 sind für die Kamerastabilisierung ?
Was hast du am kleinen schwarzen Kästchen eingestellt ? Da hats so weisse Schalter von 1-4 die man nach oben oder unten schalten kann.
Ich weis auch nicht was ich falsch mache. Die Software gibt alles sauber aus, auch wenn ich Ihn bewege. Die Kalibration nach Videoanleitung habe ich vorab gemacht da stimmt auch alles.
Ich habe die ganze Platine auf Formschaumtapes gelagert genau so wie man dies z.B bei einem Gyro von einem Heli macht.
Gruss Tino
Anhänge
Mein Hexa hatte heute Erstflug.
Auf dem Anschlusbild sind meiner Meinung nach 2 Motorenanschlüsse vertauscht.
Und zwar die beiden rechten. 2-3 und 3-4 musste ich gegeneinander tauschen.
vieleicht ist das die Lösung? Bevor ich diese Anschlüsse getauscht habe, fiel meiner auch immer um.
Die 4 weissen minischalter müssen alle nach oben( off) dann biste im stable modus
Gruß Sven
Daaaaanke Fraggle10
Daaaaanke Fraggle10
Hallo
Wie geeeiil genau daran hats gelegen, das Hexa Schema von AdruPirates ist falsch !!!
Achtung an alle die noch im Aufbau eines PiratesHexas sind. Unbedingt Verkabelung mit dem Anschluss 3-4 auf 2-3 stecken und 2-3 auf 3-4 stecken.
Solltet ihr dies vergessen fliegt der Hexa nicht oder nur sehr kurz


Nochmals 1000 Dank an Fraggle10
Gruss Tino
Daaaaanke Fraggle10
Hallo
Wie geeeiil genau daran hats gelegen, das Hexa Schema von AdruPirates ist falsch !!!
Achtung an alle die noch im Aufbau eines PiratesHexas sind. Unbedingt Verkabelung mit dem Anschluss 3-4 auf 2-3 stecken und 2-3 auf 3-4 stecken.
Solltet ihr dies vergessen fliegt der Hexa nicht oder nur sehr kurz
Nochmals 1000 Dank an Fraggle10
Gruss Tino
hallo leute,
also ich habe die zwei kabel 2 zu 3 getauscht , leider immer noch ohne erfolg ,
aber ich denke das liegt noch an meiner einstellung hab mal ein screen von der einstellung über CLI gemacht, vileicht sieht einer das Problem
ist mein Magnetometer aus , das kann es sei aber den hab ich eingeschaltet , komisch
dake, bild im Anhang
grüße dado

also ich habe die zwei kabel 2 zu 3 getauscht , leider immer noch ohne erfolg ,
aber ich denke das liegt noch an meiner einstellung hab mal ein screen von der einstellung über CLI gemacht, vileicht sieht einer das Problem
ist mein Magnetometer aus , das kann es sei aber den hab ich eingeschaltet , komisch
dake, bild im Anhang
grüße dado
Erstflug Hexakopter
Erstflug Hexakopter
Hallo Leute
Heute nach der Arbeit hab ich schnell ein Erstflug gemacht.
Fliegen tut er definitiv aber nur ohne die elektronischen helferlein wie GPS und barometrischer Drucksensor.
grüne LED = gute Flugstabilität etwas Rollbewegung um die eigene Achse von links nach rechts und umgekehrt (schaukelnd).
grüne+ orange LED = gute Flugstabilität jedoch wird die Höhe nicht wirklich gehalten. Rauf runter mindestens 2m.
grüne+ orange+ rote LED = Fluglage unkontrollierbar. Das GPS funkt ganz gehörig dazwischen. Sehr schnelle Neupositionierungen ohne das ich was mache. Springt von einem Punkt zum nächsten in einem Affenzahn.
Verbaut ist das orginal Magnetometer extern sowie der Drucksensor auf der Platine. GPS ist ein UBLOX.
Kann mir jemand beim Feintuning helfen ?
Gruss Tino
Erstflug Hexakopter
Hallo Leute
Heute nach der Arbeit hab ich schnell ein Erstflug gemacht.
Fliegen tut er definitiv aber nur ohne die elektronischen helferlein wie GPS und barometrischer Drucksensor.
grüne LED = gute Flugstabilität etwas Rollbewegung um die eigene Achse von links nach rechts und umgekehrt (schaukelnd).
grüne+ orange LED = gute Flugstabilität jedoch wird die Höhe nicht wirklich gehalten. Rauf runter mindestens 2m.
grüne+ orange+ rote LED = Fluglage unkontrollierbar. Das GPS funkt ganz gehörig dazwischen. Sehr schnelle Neupositionierungen ohne das ich was mache. Springt von einem Punkt zum nächsten in einem Affenzahn.
Verbaut ist das orginal Magnetometer extern sowie der Drucksensor auf der Platine. GPS ist ein UBLOX.
Kann mir jemand beim Feintuning helfen ?
Gruss Tino
Olaf.Albers
User
Die 4 weissen minischalter müssen alle nach oben( off) dann biste im stable modus
Gruß Sven
Hallo Piraten,
ich bin auch dabei einen Hexa auf die Beine zu stellen. Leider ist mein Oilpan defekt und muss getauscht werden da der Onboard Gyro defekt ist.
Nun zu den DIP-Switches. Ich möchte anmerken das man nicht pauschalieren sollte das alle Schalter nach oben müssen. Jeder dieser Schalter hat einen Zweck. Schaut dazu auch nochmals auf die ArduPirates Seite (Wiki).
Schalter 1 = Choosing between "X" and "+" flight directions. Up is "x" mode; Down is "+" mode.
Schalter 2 = Camera Stabilization
Schalter 3 = Fly Mode Acrobatic: Schalter = ON (unten) oder
Fly Mode Stable: Schalter = OFF (oben)
Leider weiss ich nicht was Schalter 4 macht. Vielleicht kann mir einer von euch sagen wofür der ist.
Hallo,
ich lese mich jetzt seit gut einer Woche ein und habe noch ein paar fragen.
Ich will mir einen quad bzw hexacopter bauen. Mit dem Wunderwerk der Technik möchte ich unse Rc-On und offroadstrcke von oben filmen während wir fahren. Drauf bekommen bin ich durch den Murklecopter guide auf http://www.flugwiese.de
Dazu habe ich ein paar Fragen:
1. Kann man diesen stable position/höhe modus auch mit dem multiwiicopter realisieren?
- Der ist im bau ja günstiger.
2. Wenn nicht, brauche ich die Teile wie beim threadersteller niedergeschrieben?
Sensor shield, autopilot, gps, magnetometer? (antriebsteile sind ja klar)
3. Für den Position/höhe modus brauche ich da das Magnetometer, oder ist das nur für eine Wegpunktnavigation?
4. Was wäre denn besser für einen Kameracopter? Hexa oder Quad. Welche vor und nachteile haben die + bzw x bauweisen.
5. brauche ich bei dem Ardupirate so eine platine wie bei dem wiicopter? (vermutlich nicht weil man die sensoren ja auf dem sensorboard hat?)
6. kann man wenn der copter auf höhe/gps mode steht auch via fernsteuerung auf die steuerung der kamera einwirkung. also das modul zum stabilisieren bewegen?
7. Ist das alles mit meiner vorhandenen DX6i mit dem beiliegendem empfänger nebst satelliten realisierbar oder bauche ich mehr kanäle?
Ich danke Euch im Voraus für die Beantwortung meiner Fragen.
Grüße
Max
ich lese mich jetzt seit gut einer Woche ein und habe noch ein paar fragen.
Ich will mir einen quad bzw hexacopter bauen. Mit dem Wunderwerk der Technik möchte ich unse Rc-On und offroadstrcke von oben filmen während wir fahren. Drauf bekommen bin ich durch den Murklecopter guide auf http://www.flugwiese.de
Dazu habe ich ein paar Fragen:
1. Kann man diesen stable position/höhe modus auch mit dem multiwiicopter realisieren?
- Der ist im bau ja günstiger.
2. Wenn nicht, brauche ich die Teile wie beim threadersteller niedergeschrieben?
Sensor shield, autopilot, gps, magnetometer? (antriebsteile sind ja klar)
3. Für den Position/höhe modus brauche ich da das Magnetometer, oder ist das nur für eine Wegpunktnavigation?
4. Was wäre denn besser für einen Kameracopter? Hexa oder Quad. Welche vor und nachteile haben die + bzw x bauweisen.
5. brauche ich bei dem Ardupirate so eine platine wie bei dem wiicopter? (vermutlich nicht weil man die sensoren ja auf dem sensorboard hat?)
6. kann man wenn der copter auf höhe/gps mode steht auch via fernsteuerung auf die steuerung der kamera einwirkung. also das modul zum stabilisieren bewegen?
7. Ist das alles mit meiner vorhandenen DX6i mit dem beiliegendem empfänger nebst satelliten realisierbar oder bauche ich mehr kanäle?
Ich danke Euch im Voraus für die Beantwortung meiner Fragen.
Grüße
Max
Ähnliche Themen
- Antworten
- 5
- Aufrufe
- 2K
- Antworten
- 6
- Aufrufe
- 4K