Du verwendest einen veralteten Browser. Es ist möglich, dass diese oder andere Websites nicht korrekt angezeigt werden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
DIY Multi-Wii Quadrocopter
- Ersteller Jey
- Erstellt am
Hi,
habe auch grade mein mwc board fertig .. und es scheint zu funktionieren
ich schwanke aber noch zwischen bi und tri copter ... möchte was mit eindeutigem vorne und hinten haben :P
in den mwc bi copter videos die ich bisher gesehn habe, schauen die teile noch recht wackelig und träge aus .. deshalb meine frage, kann man einen tri copter auch mit einem kleineren motor hinten bauen?
also 2 größere gegenleufige vorne und ein kleiner mit servo hinten ..
danke schonmal")
gruß
felix
habe auch grade mein mwc board fertig .. und es scheint zu funktionieren
ich schwanke aber noch zwischen bi und tri copter ... möchte was mit eindeutigem vorne und hinten haben :P
in den mwc bi copter videos die ich bisher gesehn habe, schauen die teile noch recht wackelig und träge aus .. deshalb meine frage, kann man einen tri copter auch mit einem kleineren motor hinten bauen?
also 2 größere gegenleufige vorne und ein kleiner mit servo hinten ..
danke schonmal
gruß
felix
kalle123
User
Frage zum MWC von Flyduino
Frage zum MWC von Flyduino
Hallo.
Mal eine Frage an die Fachleute hier.
Hab heute mein MWC von Flyduino erhalten.
Komme soweit mit der Beschriftung der Platine klar.
Nur zu dem rot markierten Bereich gibt mir Rätsel auf! (10 U????, LDO LM 1117?, 100N????) . LDO ist wohl der Spannungsregler zur Erzeugung von 3.3 V?
Und wie hängt der Bereich mit dem Rest des boards zusammen? Blick da nicht durch.
Gruß KH
Frage zum MWC von Flyduino
Hallo.
Mal eine Frage an die Fachleute hier.
Hab heute mein MWC von Flyduino erhalten.
Komme soweit mit der Beschriftung der Platine klar.
Nur zu dem rot markierten Bereich gibt mir Rätsel auf! (10 U????, LDO LM 1117?, 100N????) . LDO ist wohl der Spannungsregler zur Erzeugung von 3.3 V?
Und wie hängt der Bereich mit dem Rest des boards zusammen? Blick da nicht durch.
Gruß KH
Anhänge
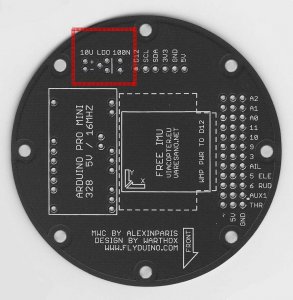
kann ich nciht sagen, kenne das Layout nicht und weiß nicht wozu es vorgesehen ist. Hatte heute mittag eines zur Reparatur auf dem Tisch, ist aber schon wieder weg, sonst hätte ich mir das ansehen können. Vermutlich zur Spannungsanpassung 5V BEC auf 3.3 V für FreeIMU oder 3.3 V Atmel-Boards. Am besten auf der Website des Anbieters sich mal schlau machen, da wird sicher Info zu finden sein, bzw. auf der Flyduino-Page.-
Dank dir Crizz. Klärt schon mal das.
Hängt der Bereich jetzt irgendwie mit dem Rest des boards zusammen?
cu KH
zitat aus der beschreibung: 'Optional kann ein 3.3V Regler verbaut werden um auch andere Sensoren zu betreiben.'
der spannungsregler und die 2 kondensatoren kann man bestücken um 3V3 zu erzeugen. manche wmp klone und auch andere sensoren brauchen die 3V3 versorgung weil sie 5V nicht vertragen.
die 3V3 kann man dann an dem gleichnamigen pin abgreifen.
für einen normalen wmp, bma020, ff imu oder freeimu braucht man das aber nicht.
Dann dürften vermutlich die Motoren unterdimensiert oder die Luiftschrauben falsch gewählt sein - sofern der Akku ausgeschlossen werden kann. Aber das kann man ohne irgendwelche Daten zu wissen nur orakeln, denn jeder verwendet andere Komponenten und baut ne andere Rahmengröße, der eine fliegt 2s-Akkus, der andere 3s oder mehr. Zu viele Faktoren , somit Glaskugelleserei - an der Software kannst du nicht viel machen, außer MaxThrottle im Sketch von 1850 auf 2000 hochsetzen.
comicflyer
User
Man kann zwar den MaxThrottle hochsetzen, aber die Motoren brauchen ja auch noch Freilauf zum Ausregeln des Copters.
Ich denke mal zuerst ans Gewicht! Und dann auch, wie Crizz, an Mots und LS.
Ansonsten sind die Infos etwas sehr dürftig....
Also, sirhenry:
1. was wiegt das Teil
2. was für Akkus, Motoren, Luftschrauben
3. LS richtig herum montiert") (passiert bei Einsteigern oft genug)
(passiert bei Einsteigern oft genug)
Ohne solche Infos erübrigt sich jedes Frage/Antwort-Spiel.
CU Eddy
Ich denke mal zuerst ans Gewicht! Und dann auch, wie Crizz, an Mots und LS.
Ansonsten sind die Infos etwas sehr dürftig....
Also, sirhenry:
1. was wiegt das Teil
2. was für Akkus, Motoren, Luftschrauben
3. LS richtig herum montiert
(passiert bei Einsteigern oft genug)Ohne solche Infos erübrigt sich jedes Frage/Antwort-Spiel.
CU Eddy
kalle123
User
zitat aus der beschreibung: 'Optional kann ein 3.3V Regler verbaut werden um auch andere Sensoren zu betreiben.'
der spannungsregler und die 2 kondensatoren kann man bestücken um 3V3 zu erzeugen. manche wmp klone und auch andere sensoren brauchen die 3V3 versorgung weil sie 5V nicht vertragen.
die 3V3 kann man dann an dem gleichnamigen pin abgreifen.
für einen normalen wmp, bma020, ff imu oder freeimu braucht man das aber nicht.
So, JETZT hab ich es geschnallt.
Dank euch - cu KH
muvid
User
Oktokopter
Oktokopter
Hallo Männers,
ab nächster Woche bin ich besitzer einer eigenen CNC-Fräse von Haase.
Sobald die Fräse das ist wollte ich einen Oktokopter bauen/fräsen mit Flyduino-Board. Zeichnung ist schon fertig.
Nun wollte ich fragen ob interesse an einem Baubericht besteht? Wenn ja...soll ich in diesem Thread weiter machen oder soll ich einen neuen eröffnen? Dann könnte man auch expliziet auf das Flyduino eingehen.
Bis denn
Erti
Oktokopter
Hallo Männers,
ab nächster Woche bin ich besitzer einer eigenen CNC-Fräse von Haase
. Sobald die Fräse das ist wollte ich einen Oktokopter bauen/fräsen mit Flyduino-Board. Zeichnung ist schon fertig.
Nun wollte ich fragen ob interesse an einem Baubericht besteht? Wenn ja...soll ich in diesem Thread weiter machen oder soll ich einen neuen eröffnen? Dann könnte man auch expliziet auf das Flyduino eingehen.
Bis denn
Erti
Hallo Ertan,
also Bauberichte finde ich auch immer sehr Interessant.
Und der Übersichthalseber, bin ich auch für einen eigenen Thread.
Bei mir ist zurzeit Zwangspause angesagt. Letzte Woche war ich mit Renovieren beschäftigt.
Und nebenbei hat sich noch das 2,4GHz Modul aus meinem Graupner Sender Verabschiedet.
Neue Regler habe ich mir auch bei HK bestellt. Aber das wird wohl noch dauern bis die da sind.
Die Quadrocopter Centerplate von Flyduino sind mittlerweile da und warten darauf, verbaut zu
werden.
Gruß Ingo
also Bauberichte finde ich auch immer sehr Interessant.
Und der Übersichthalseber, bin ich auch für einen eigenen Thread.
Bei mir ist zurzeit Zwangspause angesagt. Letzte Woche war ich mit Renovieren beschäftigt.
Und nebenbei hat sich noch das 2,4GHz Modul aus meinem Graupner Sender Verabschiedet.
Neue Regler habe ich mir auch bei HK bestellt. Aber das wird wohl noch dauern bis die da sind.
Die Quadrocopter Centerplate von Flyduino sind mittlerweile da und warten darauf, verbaut zu
werden.
Gruß Ingo