Du verwendest einen veralteten Browser. Es ist möglich, dass diese oder andere Websites nicht korrekt angezeigt werden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
Solarflieger
- Ersteller Lupo01
- Erstellt am
-
- Schlagworte
- solarzelle
GC
User
...
@Gerhard, jap, das klingt cool. Gab es nicht mal einen Chinesen der kleine Tangos gebaut hat...? Hab da doch mal was gesehen...
Ironloss free brushless oder so...
Gruesse Julian
Richtig, so was suche ich auch. Die gab es einmal von Feigao.
Es gibt aber auch bürstenlose Glockenanker,
Holger Lambertus
User
Ihr meint vermutlich die Faulhanber "Mini-Tangos" http://www.rc-network.de/forum/showthread.php/505097-Solarflieger?p=4365027&viewfull=1#post4365027
Einige Faulhaber Glocken.Bürstis kann man auch umbauen, Regler am Anker, und das Gehäuse drehen lassen. Aber die Dinger sind m.E. für unsere Zwecke zu spitz abgestimmt, an einer Stelle guter eta, drumherum fällt es steil ab. Wir brauchen etwas breitbandiges von 0,5-6A mit dem Fokus 0,5-1A.
Einige Faulhaber Glocken.Bürstis kann man auch umbauen, Regler am Anker, und das Gehäuse drehen lassen. Aber die Dinger sind m.E. für unsere Zwecke zu spitz abgestimmt, an einer Stelle guter eta, drumherum fällt es steil ab. Wir brauchen etwas breitbandiges von 0,5-6A mit dem Fokus 0,5-1A.
Holger Lambertus
User
Richtig meist 5 oder 7. Es gab mal welche mit 6/9, müsste lange suchen hier im Forum.
Hier der früher sehr beliebte Maxxon Re25 in der 24Volt Version: (Sollte auch online im DC verfügbar sein, meine ich hatte den hochgeladen)

Hier der früher sehr beliebte Maxxon Re25 in der 24Volt Version: (Sollte auch online im DC verfügbar sein, meine ich hatte den hochgeladen)
Christian Lucas
User
Hi,
gehört nicht ganz hier rein aber weil Solar betrieben und ganz ohne Speicher, ein bischen doch.
Solar Quadrocopter , http://news.nus.edu.sg/press-releases/solar-powered-quadcopter .
Happy Amps Christian
gehört nicht ganz hier rein aber weil Solar betrieben und ganz ohne Speicher, ein bischen doch.
Solar Quadrocopter , http://news.nus.edu.sg/press-releases/solar-powered-quadcopter .
Happy Amps Christian
derjuwi
User
welches stueckerl haettens denn gerne
welches stueckerl haettens denn gerne
Was nun tun... Ich stehe grade vor der Frage ob ich den kleinen oder den grossen Regler in die Serie geben soll.
Kleiner Regler:
positiv:
- Mosfets etwas besser (1.5mMilliohm *2 statt 5-6 Milliohm beim grossen), sonst identische Leistungsdaten, gleicher Lipo Ladechip...
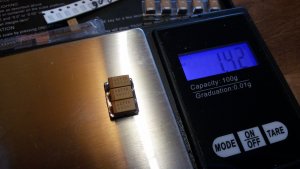
- klein (WIRKLICH klein): 14x24mm
- leichter (hab noch keinen hier, aber der grosse hat fast 3x soviel Platinenflaeche)
Nachteile:
- keine USB Buchse, Micro JST buchse stattdessen, Adapterkabel erforderlich zum updaten und konfigurieren
- WIRKLICH klein, Kabel anloeten sollte man nicht mit dem Dachrinnenkolben...
Ich bin echt unschluessig... Der coolnessfaktor ist beim kleinen natuerlich deutlich hoeher, der Preis ist ziemlich derselbe... Paar cent Unterschied...
Vorschlaege?
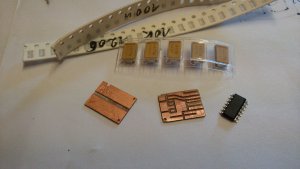
Ungefaehr so schauts aus Groessentechnisch:

der kleine mit den Blauen Fets ist etwas breiter als der normale kleine Regler.
Damit Ihr euch das vostellen koennt, der kleine Regler ist ungefaehr so gross wie zwei Micro SD Karten nebeneinander...
Oder doppelt so gross wie der:

Gruesse Julian
welches stueckerl haettens denn gerne
Was nun tun... Ich stehe grade vor der Frage ob ich den kleinen oder den grossen Regler in die Serie geben soll.
Kleiner Regler:
positiv:
- Mosfets etwas besser (1.5mMilliohm *2 statt 5-6 Milliohm beim grossen), sonst identische Leistungsdaten, gleicher Lipo Ladechip...
- klein (WIRKLICH klein): 14x24mm
- leichter (hab noch keinen hier, aber der grosse hat fast 3x soviel Platinenflaeche)
Nachteile:
- keine USB Buchse, Micro JST buchse stattdessen, Adapterkabel erforderlich zum updaten und konfigurieren
- WIRKLICH klein, Kabel anloeten sollte man nicht mit dem Dachrinnenkolben...
Ich bin echt unschluessig... Der coolnessfaktor ist beim kleinen natuerlich deutlich hoeher, der Preis ist ziemlich derselbe... Paar cent Unterschied...
Vorschlaege?
Ungefaehr so schauts aus Groessentechnisch:
der kleine mit den Blauen Fets ist etwas breiter als der normale kleine Regler.
Damit Ihr euch das vostellen koennt, der kleine Regler ist ungefaehr so gross wie zwei Micro SD Karten nebeneinander...
Oder doppelt so gross wie der:
Gruesse Julian

marvin
User
Size matters...
Size matters...
Hi Julian,
ich würde den größeren in die Fertigung geben.
Der Gewichtsunterschied dürfte absolut betrachtet irrelevant sein und mit Micro-USB und einer Größe die, die Handhabung ohne Lupenbrille ermöglicht ist der einfach alltagstauglicher.
Grüße
Dirk
Size matters...
Hi Julian,
ich würde den größeren in die Fertigung geben.
Der Gewichtsunterschied dürfte absolut betrachtet irrelevant sein und mit Micro-USB und einer Größe die, die Handhabung ohne Lupenbrille ermöglicht ist der einfach alltagstauglicher.
Grüße
Dirk
derjuwi
User
Ja, aber der Stolz... Auserdem misst der grosse den Strom nicht... Aber Ihr habt ja recht...
Und wenn ich den kleinen mit Micro USB Buchse und groesseren Pads mache? (ich fange schon an zu betteln) ^^
Nein, Spass beiseite. Ich denke Ihr habt recht. Ich bau den kleinen trotzdem fuer mich")
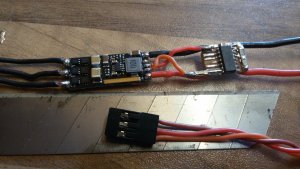
Der neu geschriebene Code rennt langsam, so schauts grade aus (den Hacker mag ich weil er in den Schraubstock passt") )
)


Gruesse Julian
Und wenn ich den kleinen mit Micro USB Buchse und groesseren Pads mache? (ich fange schon an zu betteln) ^^
Nein, Spass beiseite. Ich denke Ihr habt recht. Ich bau den kleinen trotzdem fuer mich
Der neu geschriebene Code rennt langsam, so schauts grade aus (den Hacker mag ich weil er in den Schraubstock passt
)Gruesse Julian
Holger Lambertus
User
Wer in diesem Jahr nochmal die Solarflieger live sehen will, wir sind heute auf dem Flugtag Rodenberg.
(Abfahrt A2 Bad Nenndorf, dann zweimal ums Eck, und schon da).
Denke es wird auch wieder ein spannendes Solar-Pylon-Rennen in Ameisenkniehöhe geben
lokale Flugdaten:
Azimut >45° 12:07-14:43
Meridian 47.9° 31:22
SONNE: JA
Wind: EGAL
Leider ist die Flugtagreihe dann auch schon fast wieder um, es gibt dann nur noch einen Termin im September.
(Abfahrt A2 Bad Nenndorf, dann zweimal ums Eck, und schon da).
Denke es wird auch wieder ein spannendes Solar-Pylon-Rennen in Ameisenkniehöhe geben
lokale Flugdaten:
Azimut >45° 12:07-14:43
Meridian 47.9° 31:22
SONNE: JA
Wind: EGAL
Leider ist die Flugtagreihe dann auch schon fast wieder um, es gibt dann nur noch einen Termin im September.
derjuwi
User
Logdaten erfassen
Logdaten erfassen
Ich habe heute mal mit dem openlog rumgespielt. Das ding ist klein und ich kann es an die USB Buchse klemmen (die wenn man nicht den USB des Xmegas benutzt einfach RX/TX eines Uart ist) oder an der Telemetrieschnitstelle betreiben.
Das Ding schreibt einfach was man ihm seriell schickt auf eine SD Karte. Und das mit bis zu 60 Kilobyte pro Sekunde ohne zu murren
Klingt erstmal unnsinnig schnell, ist es aber nicht. Ich moechte das Regelverhalten in Echtzeit im Flug beobachten. Der Regler erfasst Drehzahl, Spannung und Sollwerte und macht da draus PWM Vorgaben. Das aber mit derzeit 5kHz, also 5000 Mal pro Sekunde
Wenn ich also mitloggen moechte muss ich 5000 Mal pro Sekunde Spannung (2 Byte), Drehzahl (2Byte), Sollwert RC (1Byte cropped), Sollwert Spannung (2Byte) mitschreiben.
Macht 5000 Mal 7Byte + Checksumme(1Byte) + 2Byte Rechendaten => 10 Byte * 5000 -> 50 Kilobyte pro Sekunde!
Und das geht nur wenn ich binaer logge, also direkt die Rohdaten...
Dabei braucht der kleine grademal ein paar Milliampere
Damit der Regler nicht ewig haengt zum schreiben habe ich die Baudrate auf 500000 gesetzt, was aber immer noch nicht reicht um verzoegerungsfrei zu schreiben... Ich teste gerade 1 Megabaud RS232 Rate... Mal sehen
Vermutlich wird es darauf hinauslaufen die Rate etwas zu reduzieren... Der Regler ist halt aber zwingend so schnell, da er sonst nicht sauber ausregeln kann.
Dum di dum...
Logdaten erfassen
Ich habe heute mal mit dem openlog rumgespielt. Das ding ist klein und ich kann es an die USB Buchse klemmen (die wenn man nicht den USB des Xmegas benutzt einfach RX/TX eines Uart ist) oder an der Telemetrieschnitstelle betreiben.
Das Ding schreibt einfach was man ihm seriell schickt auf eine SD Karte. Und das mit bis zu 60 Kilobyte pro Sekunde ohne zu murren
Klingt erstmal unnsinnig schnell, ist es aber nicht. Ich moechte das Regelverhalten in Echtzeit im Flug beobachten. Der Regler erfasst Drehzahl, Spannung und Sollwerte und macht da draus PWM Vorgaben. Das aber mit derzeit 5kHz, also 5000 Mal pro Sekunde
Wenn ich also mitloggen moechte muss ich 5000 Mal pro Sekunde Spannung (2 Byte), Drehzahl (2Byte), Sollwert RC (1Byte cropped), Sollwert Spannung (2Byte) mitschreiben.
Macht 5000 Mal 7Byte + Checksumme(1Byte) + 2Byte Rechendaten => 10 Byte * 5000 -> 50 Kilobyte pro Sekunde!
Und das geht nur wenn ich binaer logge, also direkt die Rohdaten...
Dabei braucht der kleine grademal ein paar Milliampere
Damit der Regler nicht ewig haengt zum schreiben habe ich die Baudrate auf 500000 gesetzt, was aber immer noch nicht reicht um verzoegerungsfrei zu schreiben... Ich teste gerade 1 Megabaud RS232 Rate... Mal sehen
Vermutlich wird es darauf hinauslaufen die Rate etwas zu reduzieren... Der Regler ist halt aber zwingend so schnell, da er sonst nicht sauber ausregeln kann.
Dum di dum...
ASM ist so schwierig eigentlich nicht, 8Bit BLHeli, einfache Aufgabe: Wir schreiben den Governor von BLHeli auf MPP um.
Hier die Sourcecodes: https://github.com/bitdump/BLHeli
Zusätzlich die BLHeliSuite https://www.mediafire.com/folder/dx6kfaasyo24l/BLHeliSuite
In der BLHeli.asm ändern wir folgendes:
in der Routine "check_temp_voltage_and_limit_power“ können wir den ADC auslesen, und zwischenspeichern (erstmal nicht optimal, da langsam).
nun folgende Stelle in der ASM suchen:
Code:t0h_int_rcp_gov_by_tx: lds I_Temp2, Governor_Req_Pwm cp I_Temp2, I_Temp4 ; Is governor requested pwm equal to requested pwm? (Requested_Pwm in I_Temp4) breq t0h_int_rcp_gov_pwm_done ; Yes - branch brcs t0h_int_rcp_gov_pwm_inc ; No - if lower, then increment dec I_Temp2 ; No - if higher, then decrement rjmp t0h_int_rcp_gov_pwm_done
hier ersetzen wir die Drehzahl für das Governor_Req_Pwm mit unserem zwischengespeichertem ADC, und vertauschen im Compare die Regelrichtung. Den ganzen Rotz noch durch den Assembler schieben, und fertig is.
Nun steht uns aber schon bereits ein ordentlich laufender Regler als MPP Regler zur Verfügung, der sich mit der Windows Setup Software (Suite) schick der Maus in allen Einzelheiten einstellen lässt. Das Ganze rennt dann auf nahezu jedem Atmega8 basierendem Regler, die einem derzeit ab 2€ beim König hinterhergeworden werden, das fertige HEX bekommt dann auch der der Unerfahrene über die Suite auf seinen Regler geschossen.
Im nächstem Schritt machen wir dem ADC ein bissl Beine (die ISR ein bissl modden),
und dann kanns eigentlich auch schon zur 32Bit Version gehen (geht aber nicht öffentlich, da nicht opensource).
Richtig gute 32Bit Regler Hardware gibt es mit STM32 und voller Sensorik es für sehr wenig Geld, nur auf die Soft kommts halt an, und die rockt zur Zeit von Tag zu Tag besser
Hallo Holger,
ich lese hier schon einige Zeit mit und finde das Thema sehr spannend.
Werde mich auch an ein Solarflieger-Projekt wagen. Evtl opfere ich dafür einen älteren F3K-ler (hilite)
Arduino bzw C sind für mich kein Thema aber mit ASM hab ich es nicht so.
Aber ich versteh nicht genau was du da gemacht hast. Vor allem wie der Governor regelt.
Warum ist ADC langsam?
In dem Video https://www.youtube.com/watch?v=zzOjhA-toN8 heisst es "ESC: Racecopter ESC with DIY MPP Software"
Hast du evtl sourcen von 8Bit und 32Bit?
Ich hätte mehere kleine ESC zur Verfügung auch einen "Sunrise Siskin BLHeli-32 11A".
Dank + Gruß Maccl
Holger Lambertus
User
Moin Maccl
Die sourcen für SimonK und BLHeli sind ja offen, zumindest kann man die Anschlussbelegungen der Regler in den inc Files entnehmen, am einfachsten, ich hatte es mal am laufen, (Das Video war im Mai) aber dann wieder zugunsten der 32Bit Regler verworfen (Das Update von den 32er Regler mit der deaktivierbarem damping light kam Ende April).Ich setze mittlerweile wieder auf externen Prozessor für MPP, es wiegt keine 0,2g mehr, und habe so aber alle Freiheiten, der MPP rennt völlig unabhängig von dem was der Regler tut, niemand muss auf niemand warten, und einfacher ist es auch.
BLHELI; In meinem Fall bei ca. 3000Umdr/min, /60s/min = 50umdr. /S, ergibt bei einem 10Poler 250Feldumdrehungungen/S, der AC löst dann 6mal aus, also 1500x /Sekunden, bzw alle 667uS. Den ADC benötigt 104uS ja bei 16MHz in Standardconfig bis der sich auf dem ISR wieder meldet, also Zeit genug, um den dazwischen zu schieben. Bei höherdrehenden oder höherpoligen kann es aber auch eng werden.
Einfacher ist es natürlich in C, und bei den gemütlichen Drehzahlen schafft man das auch, neben den AVR BLDC Papers gibt es noch einige Projekte als Ausgangslage:
Ulrich Rahlig https://www.ulrichradig.de/home/index.php/avr/brushless-motor-controller
Paul Fantom https://github.com/paulfantom/BLDC-ESC
Julian https://github.com/juwis/mppt-bldc
https://www.mikrocontroller.net/articles/Brushless-Controller_für_Modellbaumotoren
https://www.mikrocontroller.net/articles/Sensorlose_BLDC_Ansteuerung
An sich immer dasselbe vom Prinzip her, teilweise ist es leider sehr Hardwarebezogen, insbesondere bei der PWM, bei den gekauften Reglern, wo die FETs nicht am PWM Pin hängen, kann man nur per ISR OVR und COMP des PWM Timers dann takten.
Vielleicht setze ich mich im Winter da nochmal dran, dann aber als kombinierten Flash für die Simonk, wie es das z.B. für die F5B Jungs gibt, dann rennt das auf jedem Simonk-tauglichem Regler.
-----------
Bilder;
Kleines externes gefrästes Platinchen, Attiny44 drauf, auf der Rückseite sind 3x470uF Tantal drauf, auf dem 32Bit reichen vermutlich auch 2Stück. Ich muss mich mal wieder mit dem Oszzy in den Garten bewegen, und entripplen, am SimonK war 1800uF perfekt, 2200 kaum sichtbar besser, 1500 hat man schon Verschlechterung gesehen, das ist aber auch noch etwas Fallabhängig.
Software habe ich zweierlei, einmal die fixedVoltage, vor ein paar Seiten hier das OneShot Update für den Cheapduino rennt mit ein paar kleinen Anpassung auf dem Attiny44, und eine (noch) experimentelle dynamik-MPP. evtl. soll noch ein Tempsensor mit in den Flieger, dann müsste es perfekt sein.
Bootloader natürlich den AVRootloader vom Hagen, Update dann über das Servokabel, spart das ganze Gedöhns mit irgendwelchen Pads und Buchsen.
Fräsdaten Code etc. kann ich gerne weitergeben. Das 1,27mm Rastermass ist das was meine Fräse, Augen und Hände mit Lötkolben grad so noch hergeben, kleiner will ich nicht
Auf den Bildern Version1 aus Juni. Hier noch mit Stecki zum Regler, um den auch mal updaten zu können.
edit, ein paar von den gefrästen Platinchen(V1) liegen hier noch rum, wenn jemand Interesse daran hat, ich brauche sie nicht mehr, weil ich etwas geändert habe. Die Bauteile dazu liegen hier auch genug.
edit-edit eine MPP-Softversion fürs OpenLog (1,7g) inkl Logfunktion der MPP-Daten und One-Wire Bootloader müsste hier auch noch im Forum rumdümpeln, das OpenLog nutzen wir ja als GPS Logger in den Solarmodellen, so sollte es dann mal beides können, aber irgendwie hat sich das mit dem GPS erledigt.
Die sourcen für SimonK und BLHeli sind ja offen, zumindest kann man die Anschlussbelegungen der Regler in den inc Files entnehmen, am einfachsten, ich hatte es mal am laufen, (Das Video war im Mai) aber dann wieder zugunsten der 32Bit Regler verworfen (Das Update von den 32er Regler mit der deaktivierbarem damping light kam Ende April).Ich setze mittlerweile wieder auf externen Prozessor für MPP, es wiegt keine 0,2g mehr, und habe so aber alle Freiheiten, der MPP rennt völlig unabhängig von dem was der Regler tut, niemand muss auf niemand warten, und einfacher ist es auch.
BLHELI; In meinem Fall bei ca. 3000Umdr/min, /60s/min = 50umdr. /S, ergibt bei einem 10Poler 250Feldumdrehungungen/S, der AC löst dann 6mal aus, also 1500x /Sekunden, bzw alle 667uS. Den ADC benötigt 104uS ja bei 16MHz in Standardconfig bis der sich auf dem ISR wieder meldet, also Zeit genug, um den dazwischen zu schieben. Bei höherdrehenden oder höherpoligen kann es aber auch eng werden.
Einfacher ist es natürlich in C, und bei den gemütlichen Drehzahlen schafft man das auch, neben den AVR BLDC Papers gibt es noch einige Projekte als Ausgangslage:
Ulrich Rahlig https://www.ulrichradig.de/home/index.php/avr/brushless-motor-controller
Paul Fantom https://github.com/paulfantom/BLDC-ESC
Julian https://github.com/juwis/mppt-bldc
https://www.mikrocontroller.net/articles/Brushless-Controller_für_Modellbaumotoren
https://www.mikrocontroller.net/articles/Sensorlose_BLDC_Ansteuerung
An sich immer dasselbe vom Prinzip her, teilweise ist es leider sehr Hardwarebezogen, insbesondere bei der PWM, bei den gekauften Reglern, wo die FETs nicht am PWM Pin hängen, kann man nur per ISR OVR und COMP des PWM Timers dann takten.
Vielleicht setze ich mich im Winter da nochmal dran, dann aber als kombinierten Flash für die Simonk, wie es das z.B. für die F5B Jungs gibt, dann rennt das auf jedem Simonk-tauglichem Regler.
-----------
Bilder;
Kleines externes gefrästes Platinchen, Attiny44 drauf, auf der Rückseite sind 3x470uF Tantal drauf, auf dem 32Bit reichen vermutlich auch 2Stück. Ich muss mich mal wieder mit dem Oszzy in den Garten bewegen, und entripplen, am SimonK war 1800uF perfekt, 2200 kaum sichtbar besser, 1500 hat man schon Verschlechterung gesehen, das ist aber auch noch etwas Fallabhängig.
Software habe ich zweierlei, einmal die fixedVoltage, vor ein paar Seiten hier das OneShot Update für den Cheapduino rennt mit ein paar kleinen Anpassung auf dem Attiny44, und eine (noch) experimentelle dynamik-MPP. evtl. soll noch ein Tempsensor mit in den Flieger, dann müsste es perfekt sein.
Bootloader natürlich den AVRootloader vom Hagen, Update dann über das Servokabel, spart das ganze Gedöhns mit irgendwelchen Pads und Buchsen.
Fräsdaten Code etc. kann ich gerne weitergeben. Das 1,27mm Rastermass ist das was meine Fräse, Augen und Hände mit Lötkolben grad so noch hergeben, kleiner will ich nicht
Auf den Bildern Version1 aus Juni. Hier noch mit Stecki zum Regler, um den auch mal updaten zu können.
edit, ein paar von den gefrästen Platinchen(V1) liegen hier noch rum, wenn jemand Interesse daran hat, ich brauche sie nicht mehr, weil ich etwas geändert habe. Die Bauteile dazu liegen hier auch genug.
edit-edit eine MPP-Softversion fürs OpenLog (1,7g) inkl Logfunktion der MPP-Daten und One-Wire Bootloader müsste hier auch noch im Forum rumdümpeln, das OpenLog nutzen wir ja als GPS Logger in den Solarmodellen, so sollte es dann mal beides können, aber irgendwie hat sich das mit dem GPS erledigt.
Anhänge


Hi Holger
besten Dank für die ausführliche Infos.
Ok, dann macht wohl für den Anfang ein externer MPP am ehesten Sinn, weils einfacher ist.
Ich hätte noch ein paar arduino pro mini hier in der Schublade. Die müssten es dafür auch tun oder?
Du hast mal ein paar Codeschnipsel für nen Cheapuino und Tiny gepostet. Hast du dazu ein Git-Projekt?
Wär doch prima wenn man für diverse Billig-µC die Sourcen zur Verfügung stellen und weiterentwickeln könnte.
zb könnte man die Dinger dann evtl gleich mit Telemetry erweitern.
weist du zufällig ob beim Sunrise Siskin BLHeli-32 11A einer von den freien pads der Telemetrieport ist?
Gruß Maccl
besten Dank für die ausführliche Infos.
Ok, dann macht wohl für den Anfang ein externer MPP am ehesten Sinn, weils einfacher ist.
Ich hätte noch ein paar arduino pro mini hier in der Schublade. Die müssten es dafür auch tun oder?
Du hast mal ein paar Codeschnipsel für nen Cheapuino und Tiny gepostet. Hast du dazu ein Git-Projekt?
Wär doch prima wenn man für diverse Billig-µC die Sourcen zur Verfügung stellen und weiterentwickeln könnte.
zb könnte man die Dinger dann evtl gleich mit Telemetry erweitern.
weist du zufällig ob beim Sunrise Siskin BLHeli-32 11A einer von den freien pads der Telemetrieport ist?
Gruß Maccl
Holger Lambertus
User
Hallo Maccl, wenn es der 16MHz ProMini ist (5V 328p), dann rennt dieser Code dadrauf, und der kann auch mit dem Sunrise 11A.
http://www.rc-network.de/forum/showthread.php/505097-Solarflieger?p=4446530&viewfull=1#post4446530
Funzt auch mit der Arduino-IDE
Telemetrie habe ich kmpl. deaktiviert, da mir das zuviel Leistung frisst, funkt ja ständig vom Empfänger zum Sender.
http://www.rc-network.de/forum/showthread.php/505097-Solarflieger?p=4446530&viewfull=1#post4446530
Funzt auch mit der Arduino-IDE
Telemetrie habe ich kmpl. deaktiviert, da mir das zuviel Leistung frisst, funkt ja ständig vom Empfänger zum Sender.
Ähnliche Themen
- Antworten
- 0
- Aufrufe
- 2K