HarryTheEagle
User
Nachdem es von allen namhaften Herstellern entsprechende, modifizierte sogenannte “Elektro-Rümpfe” für die aktuellen F3B/F3F Modelle gibt, stellt sich die Frage nach einem passenden, regelkonformen Antrieb für die Klasse F3G.
Was sind die Rahmenparameter für einen regelkonformen F3G Antrieb laut Sporting Code:
Ich möchte meine Setup-welches ich 2019/2020 optimiert habe teilen, damit interessierte Piloten schnell ohne große Experimente, einen passenden Antrieb nutzen können. Neben den einzelnen Komponenten teile ich auch einige Daten hinsichtlich der “Performance” basierend auf dem von mir eingesetzten Pike Precision 2
Schema Antriebsaufbau
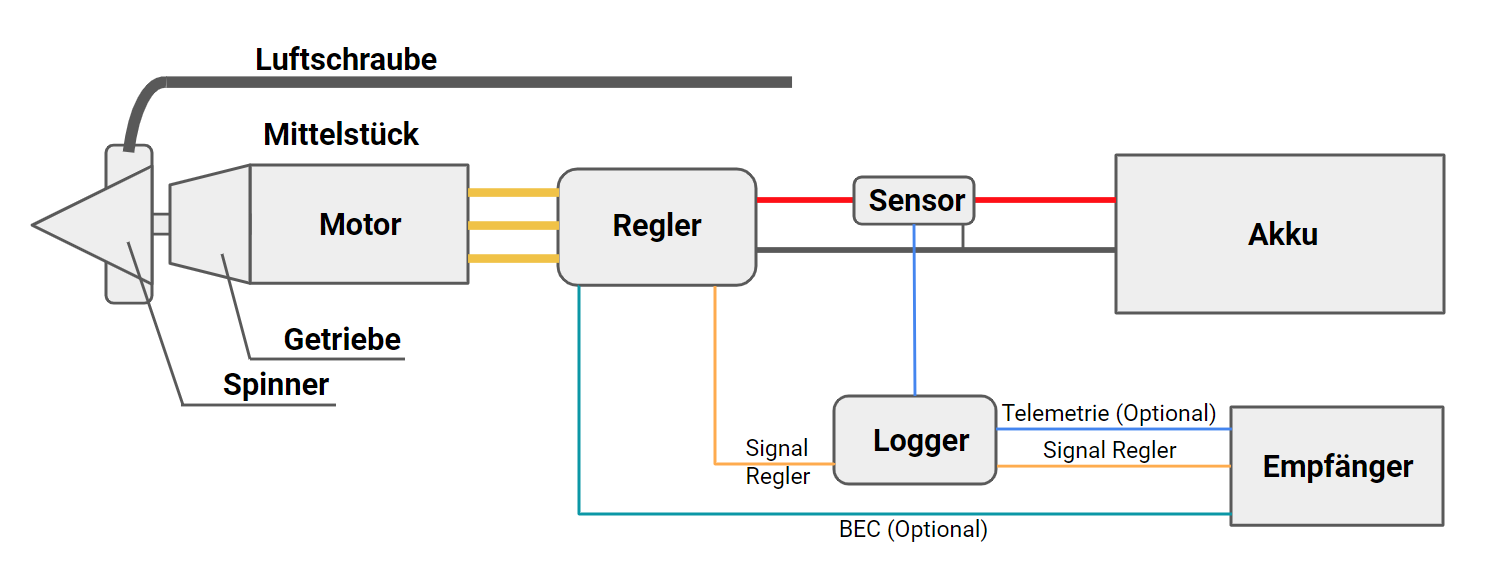
Motor: Leomotion 3031-2450
Getriebe: Leomotion 6,7:1 (6 mm Welle)
Spinner: GM 36x6, Durchmesser 36 mm
Mittelstück: Im Spinner integriert, gerade, Achsabstand 34mm
Luftschraube: GM 18x10
Akku: SLS Magnum 45C, 6S-1000mAH (2x3S seriel)
Regler: YGE 65LVT (nutze BEC)
Logger: Altis V4
Sensor: Altis Power Sensor
Alternatives Logger Setup:
Flug Erfahrung
Un-ballastiert fliege ich den Antrieb - Leistung/Motorlaufzeit nicht aus, da die erzielte Höhe > 450 Meter für mich grenzwertig ist.
Auf 3100 Gramm ballastiert, steigt der Pike Precision mit dem Setup in 30 Sekunden auf ca. 370 Meter bei einer Durchschnittsleistung von 720W und unter Ausnutzung der gesamten Energie von 350Wmin.
Mit ca. 3500 Gramm wird immer noch ca. 330 Meter erreicht.
Die Kapazität des Akkus erlaubt 2 volle Steigflüge für einen evtl. Restart. Der 2 Steigflug ist ca. 30 Meter geringer aufgrund der Spannungslage der Akkus.
Regler Erfahrung
Der YGE 65LVT funktioniert mit den Standardeinstellungen problemlos.
Ich nutze das integrierte BEC mit 8V Spannung da alles Servos HV-Servos sind
Erfahrungen Logger
Aktuell nutze ich den Altis V4, da er ein Display bereits integriert hat und damit das Auslesen der Flugdaten einfacher als beim SM Logger ist. Ich habe in der Vergangenheit auch den SM Logger genutzt. Der SM Logger hat mehr Optionen und Anschlüsse, benötigt etwas mehr Platz zum Einbau und zum Auslesen der Flugdaten muss ein externes Display angeschlossen werden.
Die beiden Logger geben sich nach meiner Erfahrung nichts. Beide haben ihre spezifischen Stärken und Schwächen.
Generell habe ich mir angewöhnt nachdem der Logger den Motor gestoppt hat, diesen noch am Sender (Schalter) auf “Aus” zu stellen. Es gab in der Vergangenheit Probleme mit Loggern, das diese nach einem Reset (Akku ab-/angesteckt und Motorschalter auf “An” den Motor sofort wieder gestartet haben.
Generell konfiguriere ich die “Not-An/Emergency Motor On” Option am Logger. Damit ist es möglich den Motor wieder zu starten obwohl die max. Energie bzw. max Motorlaufzeit bereits erreicht ist. Im Wettbewerb gibt das natürlich einen “Nuller” aber das Modell kann (hoffentlich) gerettet werden.
Bei dem SM Logger hatte ich die Herausforderung das nach einer Konfigurationsänderung der richtige Sensor wieder eingestellt werden muss. Bei meinem SM Logger wurde immer der 400A Sensor “gesetzt”, was dazu führte das die falsche Energiemenge gemessen und der Motor nach wenigen Metern abgestellt wurde.
Zum Training verwende ich die Telemetrie der Logger und Übermittlung an den Sender. Im Wettbewerb ist das natürlich tabu und das Telemetriekabel wird abgezogen.
Beide Logger bieten die Möglichkeit einen Reset-Schalter anzuschließen um den Logger schnell bei einem Neustart zu reseten. Ich nutze dazu ein Reedkontakt damit der Reset schnell von Außen per Magnet durchgeführt werden kann. Diese Funktion ist den Anleitungen gut versteckt.
Bei Interesse kann ich noch weitere Setups von F3G konformen Antrieben posten. Allerdings fehlen mir da die Flugdaten um aussagekräftige Angaben bzgl. der Starthöhen machen zu können.
Ich würde mich freuen wenn auch andere F3G Piloten Ihre Antriebskonfiguration teilen und damit den Einstieg in F3G erleichtern.
Harry
Was sind die Rahmenparameter für einen regelkonformen F3G Antrieb laut Sporting Code:
Maximum “Average Input power” 1) 800 W
Maximum energy 350 + 1 Wmin
Maximum run-time of the motor 30 + 0,1 s
Battery Any type of rechargeable batteries (U ≤ 42 Volt)
Motor Any type of motor
1) During the total energy-consumption of 350 Wmin
Ich möchte meine Setup-welches ich 2019/2020 optimiert habe teilen, damit interessierte Piloten schnell ohne große Experimente, einen passenden Antrieb nutzen können. Neben den einzelnen Komponenten teile ich auch einige Daten hinsichtlich der “Performance” basierend auf dem von mir eingesetzten Pike Precision 2
Schema Antriebsaufbau
Motor: Leomotion 3031-2450
Getriebe: Leomotion 6,7:1 (6 mm Welle)
Spinner: GM 36x6, Durchmesser 36 mm
Mittelstück: Im Spinner integriert, gerade, Achsabstand 34mm
Luftschraube: GM 18x10
Akku: SLS Magnum 45C, 6S-1000mAH (2x3S seriel)
Regler: YGE 65LVT (nutze BEC)
Logger: Altis V4
Sensor: Altis Power Sensor
Alternatives Logger Setup:
SM Unilog 2
SM Unilog Stromsensor 80A
Flug Erfahrung
Un-ballastiert fliege ich den Antrieb - Leistung/Motorlaufzeit nicht aus, da die erzielte Höhe > 450 Meter für mich grenzwertig ist.
Auf 3100 Gramm ballastiert, steigt der Pike Precision mit dem Setup in 30 Sekunden auf ca. 370 Meter bei einer Durchschnittsleistung von 720W und unter Ausnutzung der gesamten Energie von 350Wmin.
Mit ca. 3500 Gramm wird immer noch ca. 330 Meter erreicht.
Die Kapazität des Akkus erlaubt 2 volle Steigflüge für einen evtl. Restart. Der 2 Steigflug ist ca. 30 Meter geringer aufgrund der Spannungslage der Akkus.
Regler Erfahrung
Der YGE 65LVT funktioniert mit den Standardeinstellungen problemlos.
Ich nutze das integrierte BEC mit 8V Spannung da alles Servos HV-Servos sind
Erfahrungen Logger
Aktuell nutze ich den Altis V4, da er ein Display bereits integriert hat und damit das Auslesen der Flugdaten einfacher als beim SM Logger ist. Ich habe in der Vergangenheit auch den SM Logger genutzt. Der SM Logger hat mehr Optionen und Anschlüsse, benötigt etwas mehr Platz zum Einbau und zum Auslesen der Flugdaten muss ein externes Display angeschlossen werden.
Die beiden Logger geben sich nach meiner Erfahrung nichts. Beide haben ihre spezifischen Stärken und Schwächen.
Generell habe ich mir angewöhnt nachdem der Logger den Motor gestoppt hat, diesen noch am Sender (Schalter) auf “Aus” zu stellen. Es gab in der Vergangenheit Probleme mit Loggern, das diese nach einem Reset (Akku ab-/angesteckt und Motorschalter auf “An” den Motor sofort wieder gestartet haben.
Generell konfiguriere ich die “Not-An/Emergency Motor On” Option am Logger. Damit ist es möglich den Motor wieder zu starten obwohl die max. Energie bzw. max Motorlaufzeit bereits erreicht ist. Im Wettbewerb gibt das natürlich einen “Nuller” aber das Modell kann (hoffentlich) gerettet werden.
Bei dem SM Logger hatte ich die Herausforderung das nach einer Konfigurationsänderung der richtige Sensor wieder eingestellt werden muss. Bei meinem SM Logger wurde immer der 400A Sensor “gesetzt”, was dazu führte das die falsche Energiemenge gemessen und der Motor nach wenigen Metern abgestellt wurde.
Zum Training verwende ich die Telemetrie der Logger und Übermittlung an den Sender. Im Wettbewerb ist das natürlich tabu und das Telemetriekabel wird abgezogen.
Beide Logger bieten die Möglichkeit einen Reset-Schalter anzuschließen um den Logger schnell bei einem Neustart zu reseten. Ich nutze dazu ein Reedkontakt damit der Reset schnell von Außen per Magnet durchgeführt werden kann. Diese Funktion ist den Anleitungen gut versteckt.
Bei Interesse kann ich noch weitere Setups von F3G konformen Antrieben posten. Allerdings fehlen mir da die Flugdaten um aussagekräftige Angaben bzgl. der Starthöhen machen zu können.
Ich würde mich freuen wenn auch andere F3G Piloten Ihre Antriebskonfiguration teilen und damit den Einstieg in F3G erleichtern.
Harry