Servus Leute,
ich hoffe, dass ich in den nächsten Tage meine Taranis geliefert bekomme.
Habe schon viel gelesen und auch mit der Companion9x Software gespielt.
Werde zu 70% die Taranis mit eine DLG nutzen.
Gerne würde ich mir folgende Funktionen programmieren:
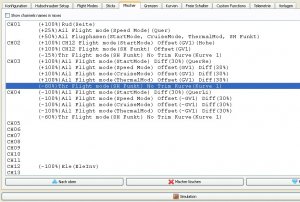
- Start Mode: alles im Strak ausser HR 2mm hoch ( schaltbar mit dem Taster rechts, soll auch alle anderen Einstellungen überschreiben )
- Speed Mode: alles im Strak
- Cruise Mode: alles im Strak ausser beide QR 2mm runter
- Thermal Mode: alles im Strak ausser beide QR 4mm runter
- Querruder Differenzierung von 30%
- Seitenruder geht automatisch mit den Querudern in Kurvenrichtung
- Gasknüppel mit Querrudern und Höhenruder verbunden ( Hebel oben --> alles in Strak. Hebel ganz unten --> beide Querruder 45° runter, Höhenruder 3mm runter )
Könnte mir bitte jemand dabei helfen? Ich komme an der ein oder anderen Stelle zur Zeit noch echt an meine Grenzen.
Vielleicht hat ja sogar jemand eine Konfigurationsdatei, die er mir mal schicken könnte.
Oder einfach den Text der Mischer mal hier einfügen.
Ich wäre sehr dankbar!!!
Gruss
Sebastian
ich hoffe, dass ich in den nächsten Tage meine Taranis geliefert bekomme.
Habe schon viel gelesen und auch mit der Companion9x Software gespielt.
Werde zu 70% die Taranis mit eine DLG nutzen.
Gerne würde ich mir folgende Funktionen programmieren:
- Start Mode: alles im Strak ausser HR 2mm hoch ( schaltbar mit dem Taster rechts, soll auch alle anderen Einstellungen überschreiben )
- Speed Mode: alles im Strak
- Cruise Mode: alles im Strak ausser beide QR 2mm runter
- Thermal Mode: alles im Strak ausser beide QR 4mm runter
- Querruder Differenzierung von 30%
- Seitenruder geht automatisch mit den Querudern in Kurvenrichtung
- Gasknüppel mit Querrudern und Höhenruder verbunden ( Hebel oben --> alles in Strak. Hebel ganz unten --> beide Querruder 45° runter, Höhenruder 3mm runter )
Könnte mir bitte jemand dabei helfen? Ich komme an der ein oder anderen Stelle zur Zeit noch echt an meine Grenzen.
Vielleicht hat ja sogar jemand eine Konfigurationsdatei, die er mir mal schicken könnte.
Oder einfach den Text der Mischer mal hier einfügen.
Ich wäre sehr dankbar!!!
Gruss
Sebastian
") ). Auch die Beispiele am Ende mal durchprogrammiert. Das von dir angesprochene kann ich leider nur zum Teil auf meine Anforderungen übernehmen.
). Auch die Beispiele am Ende mal durchprogrammiert. Das von dir angesprochene kann ich leider nur zum Teil auf meine Anforderungen übernehmen.


")
