Hallo Franz,
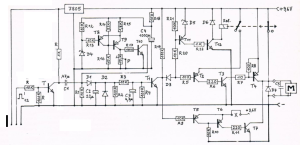
das Prinzip ist in der Tat der Linearbetrieb des Transistors (50W Verlustleistung!). Also ansteigende Spannung an einem RC-Glied dazu nutzen, um entweder den Basisstrom (und damit den Ausgangsstrom) zu steuern oder das ganze als Emitterfolger / Impedanzwandler. Und ein Gleichstrommotor folgt mit seiner Drehzahl proportional der Eingangsspannung.
Das geht ohne großen/schweren Kühlkörper in der Tat nur ganz kurz (1s) und nicht beliebig wiederholbar ohne Abkühlpause dazwischen, aber das steht ja so auch im Artikel. Aber früher wurde der Motor ja auch eingeschaltet und man war froh, nach fünf Minuten Motorlaufzeit und vielen Kreisen auf 100m Ausgangshöhe angekommen zu sein.
Ist dies nicht vom Verfasser eine sehr optimistische Aussage mit dem BEC?
"Funkenfrei" bezieht sich nicht auf das Bürstenfeuer, sondern den brachialen Funken beim Schließen und Öffnen des Schalters. Dazu schreibt der Verfasser. Und dass Spannungsschwankungen vom Flugakku (Motor an/aus) vom BEC gefiltert werden (und dadurch auch die Signalaufbereitung stabiler ist, als dies im Servo mit DEACs der Fall war).
Ansonsten baute man früher (später...) noch in die Zuleitung einen Ferritkern, dann waren die HF-Störungen, die nicht von den Entstörkondensatoren direkt am Motor geblockt wurden, immer noch vom Empfänger weg. Heutige Brushless-Regler machen deshalb nicht weniger Störungen auf der 5V-Seite, nur ist die 2.4GHz-Technik diesbezüglich etwas toleranter....
Die 1A als BEC-Strom waren auch recht blauäugig (heute wissen wir, dass Linear-BECs bei 3S und mehr als zwei Servos nicht gut gehen). Aber ein Zweiachssegler mit zwei C05 und 8NiCd, da geht das gerade noch so.
Grüße Stefan
PS: in Heft 13/78 kam dann der Nachtrag für Robbe-Anlagen. Multiplex hat nicht funktioniert, weil die Pulsbreite anders
") , gab es so nie offiziell im Handel.
, gab es so nie offiziell im Handel.