Hallo "rivaldo"
wenn ich das richtig interpretiere geht es dir haupsächlich um Gesamteffizienz und nicht um schnelles / maximales Steigen.
genau
Ich würde vorher untersuchen, welches Motormindesgewicht evtl. notwendig ist, dass bei deinem vorgebebenen Akku der Schwerpunkt ohne zusätzliches Blei eingehalten werden kann.
Kann ich stufenlos mit der Position des Akkus ausgleichen, auch wenn der Motor nur 10g wiegt.
Direkt- oder Getriebeantrieb bevorzugt?
egal, aber max 28mm Außenläufer, da sonst Probleme mit den Kabeln.
Getriebe:
-Scopions AL der Größe 2213 bis 2221 (oder andere Derivate: PeggyPepper, Hyperion...), Windungszahl bzw. spez. Drehzahl so, daß nach Getriebe an der Abtriebswelle 7000 bis max. 10000 U/min rauskommen. Aufpassen: es kommen dann schon 14 bis 16 Zoll Props zum Einsatz. Freigängigkeit (Länge Rumpfvorderteil) vorher prüfen.
Vorteil: mehr Leistungsreserven
Nachteil: teuerer (Getriebe, größere Props notwendig)
Rumpfvorderteil wäre lang genug für 23cm prop. Preis ist erstmal zweitrangig.
Direktantrieb:
AL´s: Baugrößen Außendurchmesser 28...30mm, Statorlänge 15mm, 14polig bis 16polig, spez. Drehzahl: 1000...1200U/V/min. Props: 12x6 bis 13x8 Zoll.
Scorpion 22XX, Hacker A20...
Vorteil: günstiger in Anschaffung, leiseres Laufgeräusch, noch leichter
Nachteil: geringere Leistungsreserven, aber bei 800...1000 Gramm Startgewicht 10m/s gut möglich.
Nun was soll es werden?
Darf es auch was kosten?
Soll möglichst leicht werden?
Direkt oder Getriebe?
...
Das Gesamtgewicht spielt schon eine Rolle, da durch geringes Gewicht die Gesamtflugzeit steigt (90% ist Segeln). Auch der Wiederstand der LS spielt vielleicht eine gewisse Rolle!? Standschub ist weniger wichtig als Schub aus "Reisegeschwindigkeit".
Preis ist unerheblich, da es um einen gewissen wissenschaftlichen Ansatz geht.
Direkt oder Getriebe ist mir egal. Ich dachte zunächst an einen Hacker 20-12xl evo mit 9,5x6 Cam Carbon, aber speziell was die Luftschraube und die Gesamteffizienz angeht, bin ich mir sehr unsicher. Vorgegeben sind jedenfalls die genannten Bauteile wie Akku, Regler..
Bis jetzt war ich auch nicht in der Lage den optimalen Steigwinkel auszurechnen. ich vermute lediglich, daß 90° nicht optimal ist. Zudem hängt der sicher sehr von der LS ab.
Es ist für die Versuchsanordnung nicht notwendig, daß der Motor vom Start weg non-stop läuft bis Akkus leer ist - geht schon wg. erlaubter Flughöhe nicht, sondern steigen, gleiten, steigen, gleiten,...
Gruß
Bernhard
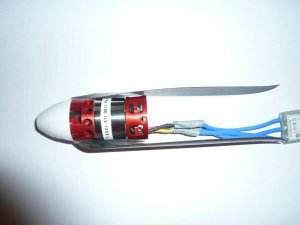
PS: habe gerade von Strecker einen Prototyp getestet: AL mit Aeronaut 13x8" Gewicht: Prop+Spinner+Motor: 100 Gramm
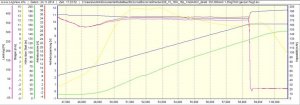
Bei Abfluggewicht (F5J-Segler 3,4m Spw. 1,35kg) Steigleistung 12..14m/s und Kapazitätsverbrauch von nur 110mAh an 3S1300mAh-Akku für 145m Steighöhe
hört sich gut an. weiß nicht, ob der Hacker x40-pro Deinen Antrieb vertragen würde. welche Steigleistung hätte wohl ein hacker 20-12xl evo mit 9,5x6 LS bei Gesamtgewicht 915g?