Seit diese Woche kann man das Modell Magic 2 MT bestellen. Das Modell wird hergestellt von Salahi Terzel aus Nord Cyprus. Es gibt drei Typen Magic 2MT: SL; 345 Gramm, Allround 415 Gr und Monster 445 Gr. Ich habe Allround gewählt. Mit diesem regnerischen Wetter habe ich bereits angefangen zu bauen.
Du verwendest einen veralteten Browser. Es ist möglich, dass diese oder andere Websites nicht korrekt angezeigt werden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
Du solltest ein Upgrade durchführen oder einen alternativen Browser verwenden.
Magic 2 MT
- Ersteller johwa
- Erstellt am
Liegestuhlflieger
User

Magic Pro KIT 2000 mm YUST / TEZEL | Zeller Modellbau
F3B – RES Wettbewerbsmodell made in Zyprus by Salahi Tezel
Gruß
Dietmar
Liegestuhlflieger
User
Hallo Johann,
alles klar!
Kannst du ein paar Bilder vom Bau zeigen?
Gruß
Dietmar
alles klar!
Kannst du ein paar Bilder vom Bau zeigen?
Gruß
Dietmar
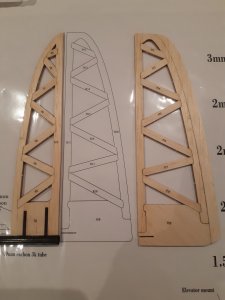
Ich habe das Ruder vergrößert weil, es im Vergleich zum Xdream sehr klein ist.
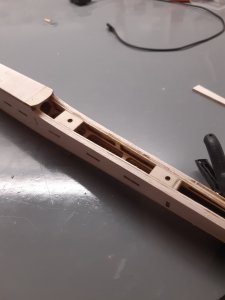
Der Rumpf besteht aus 3 mm Balsa ohne Sperrholz und fühlt sich etwas grob und sperrig an, aber robust. Der Rumpf ist jetzt auf der Tragflächenhalterung fast fertig.
Der Rumpf besteht aus 3 mm Balsa ohne Sperrholz und fühlt sich etwas grob und sperrig an, aber robust. Der Rumpf ist jetzt auf der Tragflächenhalterung fast fertig.
Anhänge



Zuletzt bearbeitet:
Hans Hoffmann
User
Hallo,
mit der Größe des Seitenleitwerks stellt man auch das Kreisverhalten ein. Bei einem zu großen SL zieht das Modell beim engeren Kreisen den Kreis immer enger zu, sodass man gegensteuern muss. Bei richtig dimensioniertem SL bleibt der Kreis ohne Seiteneingabe, nur mit Höhenruder, stabil. Oder es muss sogar etwas Seitenruder in Drehrichtung gegeben werden. Beim Kreisen ist ein kleines SL angenehm zu fliegen.
Gruß Hans
mit der Größe des Seitenleitwerks stellt man auch das Kreisverhalten ein. Bei einem zu großen SL zieht das Modell beim engeren Kreisen den Kreis immer enger zu, sodass man gegensteuern muss. Bei richtig dimensioniertem SL bleibt der Kreis ohne Seiteneingabe, nur mit Höhenruder, stabil. Oder es muss sogar etwas Seitenruder in Drehrichtung gegeben werden. Beim Kreisen ist ein kleines SL angenehm zu fliegen.
Gruß Hans
Hans Hoffmann
User
Und ich werde das Seitenruder des X-Dream über den Winter noch etwas verkleinern. Es wirkt hervorragend und kann nach meinem Geschmack ruhig etwas kleiner ausfallen. Hat ja auch etwas mit Gewicht zu tun.
Hallo Norbert,
mein X-Dream hat die von mir beschriebene Wirkung gezeigt, so dass ich nach den ersten Flügen ein schmaleres Ruderblatt gebaut hab. Damit geht er im Kreis perfekt. Kann auch etwas damit zu tun haben, wie sehr man den vorderen Rumpf verrundet. Ein eckig belassener Rumpf kann das Seitenleitwerk kompensieren.
Gruß Hans
Norbert12
User
Hallo Hans,
wie breit ist Dein schmaleres Ruderblatt beim X-Dream jetzt eigentlich. Wenn Du damit zufrieden bist, würde ich das Maß für meine geplante Änderung auch übernehmen.
Wahrscheinlich wäre dieses Maß auch für Johan zum Vergleichen mit dem Originalmaß des Magic interessant, womit wir uns nebenbei auch wieder dem Ursprungsthema angenähert hätten ;-)
Gruß Norbert
wie breit ist Dein schmaleres Ruderblatt beim X-Dream jetzt eigentlich. Wenn Du damit zufrieden bist, würde ich das Maß für meine geplante Änderung auch übernehmen.
Wahrscheinlich wäre dieses Maß auch für Johan zum Vergleichen mit dem Originalmaß des Magic interessant, womit wir uns nebenbei auch wieder dem Ursprungsthema angenähert hätten ;-)
Gruß Norbert
Hans Hoffmann
User
Das Ruder des Magic 2 im Vergleich zum Xdream. Das Ruder des Xdream war rundum 25 mm größer als das des Magic 2MT. Jetzt noch durchschnittlich hinten 9 mm, und unten 25 mm. Aber so ist ein bessere V-Form möglich weil es mehr Holz gibt des Endliste.
Die Vergrößerung hängt vom Gefühl ab. (Ich fliege der Xdream mit 30 % Expo auf Ruder.)
Dann der Flügel: Die Ohren des Flügels des Xdream sind 23 cm, aber die Ohren des Magic 2 sind 30 cm. Ich habe den Winkel der Flügelteile der Magic 2 noch nicht gemessen. Dies wirkt sich natürlich auch auf das Kreisverhalten aus.
.jpg")
Realistischer Kompromiss?
Die Vergrößerung hängt vom Gefühl ab. (Ich fliege der Xdream mit 30 % Expo auf Ruder.)
Dann der Flügel: Die Ohren des Flügels des Xdream sind 23 cm, aber die Ohren des Magic 2 sind 30 cm. Ich habe den Winkel der Flügelteile der Magic 2 noch nicht gemessen. Dies wirkt sich natürlich auch auf das Kreisverhalten aus.
Realistischer Kompromiss?
Zuletzt bearbeitet:
Norbert12
User
Mir fällt gerade ein Kommentar eines langjährigen Konstrukteurs und Autors einer Fachzeitschrift ein, der einmal offenbar völlig frustriert in einem seiner Artikel jedwede Änderung an Modellen nach Bauplänen und Baukästen ganz pauschal als Verschlimmbesserungen abkanzelte.
Solche Gedanken., wie „Jugend forscht“, oder man Dinge auch seinen Vorlieben und Gewohnheiten anpassen, oder einfach nur Spaß haben, sind ihm wohl fremd. Schade für ihn. Soweit das Wort zum Sonntag.
Das Handling vom X-Dream finde ich sehr ausgewogen und im besten Sinne „Anfänger-gerecht“. In der Thermik kreise ich ihn am liebsten, indem ich die Kurve mit dem Seitenruder einleite, das Höhenruder entsprechend der gewünschten Kreisgröße ziehe und fest halte und dann nur noch mit dem Seitenruder die Schräglage bestimme. Also im Normalfall immer Gegenseitenruder geben. Stärkere Thermik erfordert mehr und schwächere Thermik weniger Gegenseitenruder. Gerade beim Zentrieren lässt sich die Thermik somit geradezu direkt am nötigen Knüppelausschlag des Seitenruders fühlen.
Ich bin schon gespannt, wie sich in diesem Sinne ein etwas kleineres Seitenruder verhalten wird. Allerdings, Johan, um auf die Frage aus deiner letzte Zeile zurück zu kommen: Das ist eine spannende Frage. Ehrlicherweise muss man beim Vergleich zweier Modelle immer bedenken, dass man Äpfel und Birnen nur eingeschränkt vergleichen kann.
Gruß Norbert
Solche Gedanken., wie „Jugend forscht“, oder man Dinge auch seinen Vorlieben und Gewohnheiten anpassen, oder einfach nur Spaß haben, sind ihm wohl fremd. Schade für ihn. Soweit das Wort zum Sonntag.
Das Handling vom X-Dream finde ich sehr ausgewogen und im besten Sinne „Anfänger-gerecht“. In der Thermik kreise ich ihn am liebsten, indem ich die Kurve mit dem Seitenruder einleite, das Höhenruder entsprechend der gewünschten Kreisgröße ziehe und fest halte und dann nur noch mit dem Seitenruder die Schräglage bestimme. Also im Normalfall immer Gegenseitenruder geben. Stärkere Thermik erfordert mehr und schwächere Thermik weniger Gegenseitenruder. Gerade beim Zentrieren lässt sich die Thermik somit geradezu direkt am nötigen Knüppelausschlag des Seitenruders fühlen.
Ich bin schon gespannt, wie sich in diesem Sinne ein etwas kleineres Seitenruder verhalten wird. Allerdings, Johan, um auf die Frage aus deiner letzte Zeile zurück zu kommen: Das ist eine spannende Frage. Ehrlicherweise muss man beim Vergleich zweier Modelle immer bedenken, dass man Äpfel und Birnen nur eingeschränkt vergleichen kann.
Gruß Norbert
Hans Hoffmann
User
Ein Tip: bei Seil-Feder-Anlenkung nicht nur das Ruderblatt scharnierseitig anschrägen, sondern auch die Dämfungsfläche. Sonst wird der Ruderausschlag zugseitig zu sehr eingeschränkt.
Gruß Hans
Gruß Hans
Das Höhenruder ist fest geklebt auf dem Carbonrohr. Ich muss es nicht zerlegen, es kann auch ohne.
Eine änderung des Einstellwinkels ist hier eh nicht mehr möglich.
Eine änderung des Einstellwinkels ist hier eh nicht mehr möglich.
Anhänge


Sieht super aus.
Wie viele Stunden hast du den bis zum Rohbau ca. benötigt? Mehr als 25h?
Wie viele Stunden hast du den bis zum Rohbau ca. benötigt? Mehr als 25h?
STM2015
User
Ich hatte das Vergnügen, die "Urversion" (Zentralklappe und Leitwerke aus dem Brett gefräst) vor dem Start in Deutschland mit einem Kollegen in 2019 zu Bauen und in 2020 ausgiebig zu testen. Mein Magic wurde als F5RES mit Hacker A-10-7L, 2200kV mit 4,4:1 Getriebe und VM Spinner Pro Durchmesser 30 mm mit gekröpftem Mittelteil und VM Propeller 12“x8“ von Mahmoudi Modellsport versehen. Beim Einkleben des Rumpfrohres in das vordere Rumpfboot habe ich bei der Änderung unter Punkt 1) die EWD auf 1,9° reduziert. Berechnungen mit WINlaengs, FLZ Vortex und XFLR5 ergaben für die neue Geometrie und diese EWD und einen Schwerpunkt von 77 mm im Punkt des maximalen Gleitens, für geringstes Sinken muss das Höhenruder etwa 1,5° gezogen werden, um die Flügelanströmung auf 4° zu bringen. Ausgiebige Testflüge haben den Schwerpunkt bei 77 mm bestätigt; dabei ergibt sich ein Gesamtgewicht von 525 g. Für die Elektroversion, denke ich, ein guter Wert.
Wir haben im Laufe der Erprobung einige Änderungen vorgenommen, die wir jeweils an Salahi Tezel kommuniziert haben. Diese will ich hier kurz beschreiben (Bilder anbei):
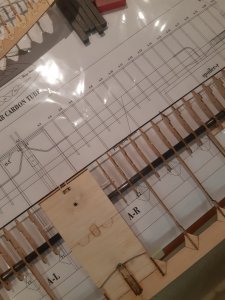
1) das Rumpfrohr erschien mir in der Originalversion etwas biegeweich und der Hebelarm zu kurz. Ich habe für den Elektrorumpf daher ein steiferes und längeres Rohr verwendet (Eigenbau aus einer DLG Rumpfform). Der neue Leitwerkshebelarm beträgt nun 812 mm (vorher 700 mm) von Flügelnasenleiste bis HLW Nasenleiste. Das entspricht nun dem Faktor 4,2 bezogen auf die mittlere aerodynamische Flügeltiefe (vorher 3,6). Durch das Gewicht des Motors spielt das längere Rumpfrohr keine Rolle beim Einstellen des Schwerpunktes (durch Verschieben des Akkus; kein Trimmblei).
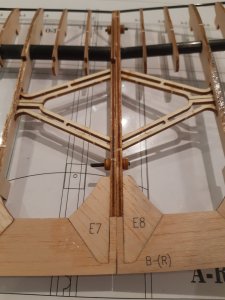
2) eine Betrachtung der Brettprofile der Leitwerke in Profili oder XFLR5 ergibt, dass schon bei Anströmwinkeln von mehr als ca. 3 bis 4° die Strömung an den Leitwerken abreist. Ich habe daher direkt hinter den Leitwerksnasen jeweils einen Zackenband Turbulator angebracht. Seitdem ist das Steuerverhalten wesentlich angenehmer, insbesondere bei höheren Windgeschwindigkeiten oder in turbulenter Luft.
3) die Leitwerke (HR und SLW) sind mit Feder/Seilzug-Anlenkung ausgeführt (0,4 mm Stahldraht U-förmig gebogen als Feder, Schmuckdraht als Seilzug, wie im DLG/F3K Forum mehrfach beschrieben). Beim SLW weicht durch den einseitigen Federdruck das Leitwerk nach einer Seite gegen das Tasa Scharnier aus. Daher habe ich ein Fusslager nachgerüstet: unten in der Nase der Klappe habe ich ein Kohlerohr (Dinnen 1mm) eingeklebt; unten an das Rumpfrohr habe ich einen L-förmig gebogenen Stahldraht geklebt, welche in das Kohlerohr greift. Das Leitwerk bleibt abnehmbar und ist nun sauber geführt. Die Folge: sauberes und präzises Steuerverhalten.
4) noch ein Hinweis zur Ballstierung: die Seglerversion hat ja die Möglichkeit im Rumpf bereits konstruktiv vorgesehen. Im Elektrorumpf ist dafür kein Platz. Bei meiner Schwerpunktlage kann ich eine Ballaststange in den Flügelholm schieben und mit Abstandhaltern gegen die Verbinder am Verrutschen sichern. Der Schwerpunkt bleibt dabei konstant oder wandert nur geringfügig nach vorne.
Wir haben im Laufe der Erprobung einige Änderungen vorgenommen, die wir jeweils an Salahi Tezel kommuniziert haben. Diese will ich hier kurz beschreiben (Bilder anbei):
1) das Rumpfrohr erschien mir in der Originalversion etwas biegeweich und der Hebelarm zu kurz. Ich habe für den Elektrorumpf daher ein steiferes und längeres Rohr verwendet (Eigenbau aus einer DLG Rumpfform). Der neue Leitwerkshebelarm beträgt nun 812 mm (vorher 700 mm) von Flügelnasenleiste bis HLW Nasenleiste. Das entspricht nun dem Faktor 4,2 bezogen auf die mittlere aerodynamische Flügeltiefe (vorher 3,6). Durch das Gewicht des Motors spielt das längere Rumpfrohr keine Rolle beim Einstellen des Schwerpunktes (durch Verschieben des Akkus; kein Trimmblei).
2) eine Betrachtung der Brettprofile der Leitwerke in Profili oder XFLR5 ergibt, dass schon bei Anströmwinkeln von mehr als ca. 3 bis 4° die Strömung an den Leitwerken abreist. Ich habe daher direkt hinter den Leitwerksnasen jeweils einen Zackenband Turbulator angebracht. Seitdem ist das Steuerverhalten wesentlich angenehmer, insbesondere bei höheren Windgeschwindigkeiten oder in turbulenter Luft.
3) die Leitwerke (HR und SLW) sind mit Feder/Seilzug-Anlenkung ausgeführt (0,4 mm Stahldraht U-förmig gebogen als Feder, Schmuckdraht als Seilzug, wie im DLG/F3K Forum mehrfach beschrieben). Beim SLW weicht durch den einseitigen Federdruck das Leitwerk nach einer Seite gegen das Tasa Scharnier aus. Daher habe ich ein Fusslager nachgerüstet: unten in der Nase der Klappe habe ich ein Kohlerohr (Dinnen 1mm) eingeklebt; unten an das Rumpfrohr habe ich einen L-förmig gebogenen Stahldraht geklebt, welche in das Kohlerohr greift. Das Leitwerk bleibt abnehmbar und ist nun sauber geführt. Die Folge: sauberes und präzises Steuerverhalten.
4) noch ein Hinweis zur Ballstierung: die Seglerversion hat ja die Möglichkeit im Rumpf bereits konstruktiv vorgesehen. Im Elektrorumpf ist dafür kein Platz. Bei meiner Schwerpunktlage kann ich eine Ballaststange in den Flügelholm schieben und mit Abstandhaltern gegen die Verbinder am Verrutschen sichern. Der Schwerpunkt bleibt dabei konstant oder wandert nur geringfügig nach vorne.
Anhänge




Ähnliche Themen
- Antworten
- 13
- Aufrufe
- 5K
- Antworten
- 2
- Aufrufe
- 7K