Baubericht
Baubericht
So, nachdem gestern endlich das Wetter für einen Erstflug gepasst hat will ich im ersten Anlauf erstmal einen kurzen Baubericht von meiner Seite liefern.
Die Qualität des Modells ist überdurchschnittlich, der Bau ging weitestgehend problemlos, aber nicht ganz ohne Grund zum "nörgeln".
Beim meinem Exemplar waren z.B. die Flächen unter den Schlitzen für die Side-Force-Generatoren nicht so 100%ig sauber geklebt, sodass da unterm Schlitz die Rippe im Weg war, d.h. man konnte den Tipp aus der Bauanleitung mit "von unten nach oben durch stechen" vergessen.
Auch die Schlitze für die Ruderscharniere waren z.T. kaum vorhanden, war ein ziemliches Gefummel, was die Bauzeit unangenehm in die Länge zog.
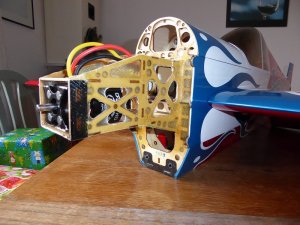
Der Anleitung empfiehlt wegen Schwerpunkt den Einbau des Seitenruder-Servos im Motorhalter.
Damit ist bei mir bei Verwendung von 2x2200mAH 30C Akkus der Schwerpunkt zu weit vorn.
Das werde ich wohl noch umbauen müssen. Ich denke mal, der Einbauort in der Mitte des Rumpfes passt besser.
Richtiger Mist ist der Propeller-Mitnehmer aus Weich-Alu mit "dazu passender" Alu-Mutter. Das kann nicht gut gehen, die Mutter hat sich bei mir schon bei der ersten Probe-Montage mit dem Mitnehmer "kaltverschweißt" und ging nur noch mit Gewalt runter.
Zum Schluss kam dann noch das Problem mit dem Ruderflattern auf, aber da sind wohl die Graupner-Servos dran schuld.
Meine Futaba-Funke mögen sie und auch andere hauptsächlich ältere Servos nicht so,
da muß ich dann jeweils einen Simprop Empfänger* nutzen,
da man bei diesen die
Framerate einstellen kann.
- Das Problem ist aber auch bekannt und macht sich bei mehr wie 5,8Volt
Empfängerstrom richtig kräftig bei mir bemerkbar.
Nun, ich hab einen Jeti, der macht normalerweise (einstellbar) 20ms Framerate, aber wenn ich da was dran ändere, dann ändert sich an dem Problem nix.
Wäre auch wenig plausibel, dass das Flattern ist wohl eher ein Problem des Regelkreises auf der mechanischen Seite.
Das die Empfängerspannung auf's Ruderflattern Einfluss hat ist schon eher plausibel, weil die Servos bei höherer Spannung schneller laufen.
Blöderweise lässt sich bei dem mitgelieferten Quantum-Regler die 6V-Empfängerspannung nicht per Setup reduzieren.
Inzwischen habe ich mich mit der "mechanischen Dämpfung" angefreundet:

Sieht nichtmal so schlecht aus, wenn man nicht weiß, dass der dunkle Schaumstoff da nicht hin gehört, dann fällt das nicht auf.
Einziger Nachteil ist, dass die Servos in der Nullposition bisschen quängeln.
Mal sehen, vielleicht baue ich doch noch auf die Hitec-Servos um.
Insgesamt ist es ein wunderschönes Modell geworden:

Nur für den Transport des Rumpfs muss ich mir noch was einfallen lassen. Hab da kein gutes Gefühl, wenn der "nackt" im Auto liegt.

")

")

 :rolleyes:")