merijnwijnen
User
Mal Vorstellen:
Ich bin langjähriger (Experimental) Modellflieger und möchte mal ein Solarflieger bauen. "Das" Buch habe ich schon gelesen, und die sehr lange, informative aber leider unstrukturierte Geschichte hier. Deutsch is nicht meine Muttersprache, also Fehler nich beachten...
Erfahrung in Leichtbau habe ich schon, letztes Projekt war ein 28 gr / 50 cm mini-DLG, voll CFK (14 gr Leergewicht) . Auch mit Elektronik und Software habe ich mich schon beschäftigt.
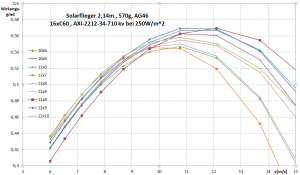
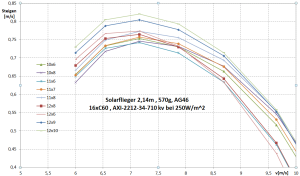
Ich bin jetzt dran die Auslegungsberechnungen zu machen, es wird ein Wiesenschleicher für schwache Bedingungen, soll ja im Winter noch fertig werden.
Zur Antriebsauslegung habe ich da eine Frage:
Ich habe mal versucht met Motocalc, Drivecalc und Ecalc zu rechnen. Wenn ich gleiche Propeller mit gleichem Drehzahl rechne, sind Motocalc und Drivecalc relative nah, Ecalc rechnet mir ein viel höhere Standschub (>1/3 mehr). Die Propellermodellen von Drivecalc sind vielversprechend, leider rechnet Drivecalc nur im Stand, nicht im Flug. Was nutzt ihr zum Antriebsauslegung? Was da in die Programmen gerechnet wird is leider sehr unklar, Spezial wie die Propellerkonstanten exakt definiert sind is nur für Drivecalc festgelegt.
Ich habe eine sehr interessante Veröffentlichung gefunden von M. Selig, mit Windkanal Messungen vieler Propeller:
https://m-selig.ae.illinois.edu/pub...2020-AIAA-Paper-2020-2762-CamPropsTesting.pdf
Kennt ihr das? Da sind jede menge Aeronaut Propeller drin den wir normalerweise benutzen können, mit Ct un Cp nach NACA definition (wird auch in Propcalc benutzt.)
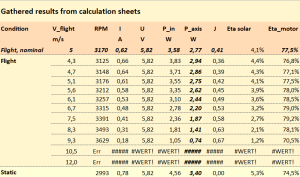
Ich überlege mich jetzt um basiert auf diese Daten eine einfaches Excel program zu basteln damit ich mit relevante Daten im Flug rechnen kan. Das alte Program von Schenk/Persson könnte da eine gute Basis sein tue die Motordaten, Propeller tue ich dan selber auf basis der Selig Messungen.
Es kommen sicher noch mehr Fragen, aber für jetzt ist Schluss.
Grüsse,
Merijn
Ich bin langjähriger (Experimental) Modellflieger und möchte mal ein Solarflieger bauen. "Das" Buch habe ich schon gelesen, und die sehr lange, informative aber leider unstrukturierte Geschichte hier. Deutsch is nicht meine Muttersprache, also Fehler nich beachten...
Erfahrung in Leichtbau habe ich schon, letztes Projekt war ein 28 gr / 50 cm mini-DLG, voll CFK (14 gr Leergewicht) . Auch mit Elektronik und Software habe ich mich schon beschäftigt.
Ich bin jetzt dran die Auslegungsberechnungen zu machen, es wird ein Wiesenschleicher für schwache Bedingungen, soll ja im Winter noch fertig werden.
Zur Antriebsauslegung habe ich da eine Frage:
Ich habe mal versucht met Motocalc, Drivecalc und Ecalc zu rechnen. Wenn ich gleiche Propeller mit gleichem Drehzahl rechne, sind Motocalc und Drivecalc relative nah, Ecalc rechnet mir ein viel höhere Standschub (>1/3 mehr). Die Propellermodellen von Drivecalc sind vielversprechend, leider rechnet Drivecalc nur im Stand, nicht im Flug. Was nutzt ihr zum Antriebsauslegung? Was da in die Programmen gerechnet wird is leider sehr unklar, Spezial wie die Propellerkonstanten exakt definiert sind is nur für Drivecalc festgelegt.
Ich habe eine sehr interessante Veröffentlichung gefunden von M. Selig, mit Windkanal Messungen vieler Propeller:
https://m-selig.ae.illinois.edu/pub...2020-AIAA-Paper-2020-2762-CamPropsTesting.pdf
Kennt ihr das? Da sind jede menge Aeronaut Propeller drin den wir normalerweise benutzen können, mit Ct un Cp nach NACA definition (wird auch in Propcalc benutzt.)
Ich überlege mich jetzt um basiert auf diese Daten eine einfaches Excel program zu basteln damit ich mit relevante Daten im Flug rechnen kan. Das alte Program von Schenk/Persson könnte da eine gute Basis sein tue die Motordaten, Propeller tue ich dan selber auf basis der Selig Messungen.
Es kommen sicher noch mehr Fragen, aber für jetzt ist Schluss.
Grüsse,
Merijn


")

 )
) 



")
