Heureka!!!
Heute endlich unsere neue Zeitnehmung aufgebaut, die ich gestern von Christian bekommen habe!
Er hat noch letzte Korekturen in der Software durchgeführt!
Und sie funktioniert auf Anhieb.
Was hat sich geändert!
Wir hatten als Hangflugverein F3F Austria bereits 3 Zeitnehmungen.
2 Davon in der Ausführung für Wettbewerbe und eine in abgespeckter Version für das Training.
Die Trainingsanlage hatten wir in Verbindung mit der Kameralösung piCAMtracker von Axel .
Hier noch einmal Danke für seine Lösung, die er uns allen zur Verfügung gestellt hat.
Und natürlich an Gerhard der diese Lösung umgesetzt hat!
Nach einigen Anfangsschwierigkeiten mit der Erkennung,
konnte Gerhard mit der der neuen Software von Axel hier eine Erkennungsrate von über 95 % schaffen.
Was aber immer wieder zu Schwierigkeiten geführt hat, war die wilde Verkabelung in unseren Zeitnehmungen.
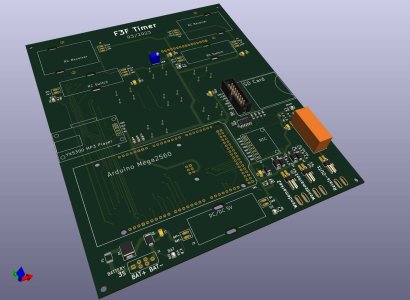
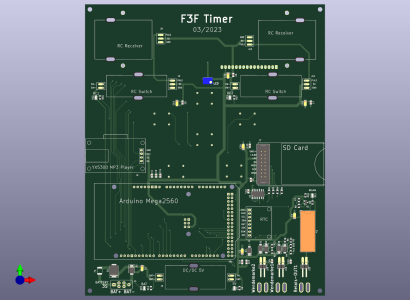
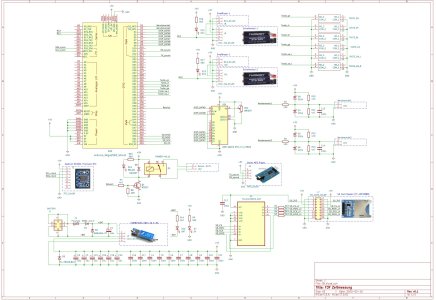
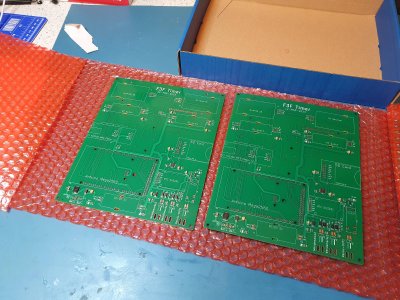
Hier war eigentlich von Anfang an geplant, die Anlage auf Printplattenbasis zu bauen.
Doch nachdem dann alle Anlagen auf "Versuchsbasis" gebaut wurden und dann auch nicht wirklich wer Lust hatte,
hier weiter zu arbeiten haben wir halt so weiter "gewurschtelt".
Immer wieder hat es Probleme mit den Steckverbindungen gegeben und man musste sehr oft "nacharbeiten"!
Vor ca. 3 Monaten habe ich dieses Thema mit Manfred angesprochen,
der mich zu Alois vermittelt hat: Alois hat sich dankensweise dieser Aufgabe angenommen.
Ich bin mir sicher, dass er nicht geahnt hat, was er da auf sich nimmt.
Das Endergebnis (3 gleichwertige Zeitnehmungen) ist eine professionelle Lösung auf die er wirklich stolz sein kann.
Und unser Dank wird Ihn ewig verfolgen!
Die Funktion: Alle Zeitnehmungen funktionieren sowohl mittels Kabel-, als auch über 2,4 GHZ Verbindung.
Die Kameras piCAMtracker funktionieren über Funk 2,4 und können zusätzlich,
wenn man die Kamerafunktion ausschaltet mittels Drucktaster betätigt werden.
Somit hat man für Wettbewerbe bereits eine Funkstrecke, die perfekt funktioniert.
Die Zeiten werden automatisch auf eine SD Karte geschrieben und im Laptop sofort in einem Excel Programm nach dem Durchgang,
oder Training ausgewertet werden.
Hier verwenden wir die Software von Christian, der auch schon viel Zeit und Arbeit investiert hat!
Im Trainingsprogramm mit der Kameralösung piCAMtracker werden zusätzlich die Außenzeiten erfasst.
Für das Training eine tolle Lösung, da man hier sehr gut seine Genauigkeit bei der Wende verbessern kann.
Es ist in der Software so eingestellt, dass immer jeder 5 Mal fliegen kann.
Deswegen am Angang der aufruf 1.1.
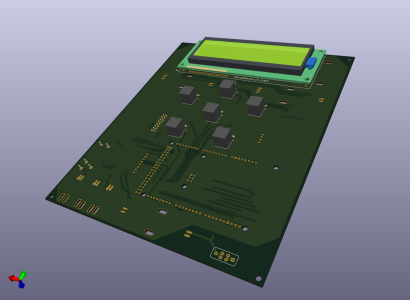
Es werden alle Zeiten, Einflug, Endzeit und die Aussenzeiten angesagT!
Beim Wetbewerb wird hier natürlich die Startnummer aufgerufen.
Alles in Allem sind wir jetzt echt glücklich,
endlich eine perfekte, professionelle Lösung für unseren Verein bzw. bei Wettbewerben zu haben.
Ich möchte mich nochmals als Obmann unseres Vereins F3F Austria
bei Alois, Christian und Gerhard bedanken.
Ohne diese perfekte Zusammenarbeit wäre dieses Projekt nicht möglich gewesen!
Jetzt müssen wir nur mehr auf gutes Flugwetter warten, damit wir es am Hang einsetzen können!
Liebe Grüße Hannes
Hier noch eine Video eines neuen Worldrecords!
https://www.youtube.com/watch?v=YxQytm3aI1Q
PS: das ganze passt auch noch in einen kleinen Koffer!







") )
)