Da mich das mit dem Winkelfehler der Zellen interessiert hat habe ich mal versucht das auszurechnen...
Man kann ja mit den Daten der Zellen Kennlinien berechnen. Wenn man dann mit dem Solarstrom (Einstrahlung bzw. Einstrahlwinkel) spielt kann man schön sehen was sich in den Kennlinien tut und ausrechnen wie viel Leistung man in einer Parallelschaltung bzw. einer Serienschaltung herausholen kann.
Hier erst einmal die Kennlinien in Abhängigkeit vom Einstrahlwinkel bei 500W/m² (Bad Pyrmont 21.4/8. 13:00...).
Den Solarstrom habe ich hierzu aus dem Kurzschlussstrom bei 1000Watt/m² durch halbieren berechnet (er ist ja linear zur Einstrahlung) anschließend mit dem jeweiligen Cosinus der Zenitdistanz der Sonne multipliziert (bei 75° noch 34%).
.jpg")
.jpg")
Wenn man nun von einer Winkeldifferenz von 10° zwischen zwei Zellen ausgeht kann man die jeweils passenden Kennlinien berechnen und sie virtuell parallel oder in Serie zusammenschalten.
Bei der Parallelschaltung sind die Spannungen identisch (sollte so gewählt werden, dass die Gesamtleistung maximal ist - die MPP's der beiden Zellen unterscheiden sich zumindest bei halbwegs realistischen Einstrahlwinkeln aber nur sehr gering) und die Ströme addieren sich.
Bei Serienschaltung ist der Strom (fast) durch die schwächere Zelle vorgegeben und die Spannungen addieren sich.
Wenn man nun die Einstrahlwinkel variiert kann man den Unterschied in der Gesamtleistung bewerten. Hier nun die Gesamtleistung für 20Zellen:

Wie zu erwarten hat man so gut wie keinen Unterschied bei senkrechter Einstrahlung. Mit zunehmender Schrägbestrahlung steigen die Unterschiede. Bei 45° Einstrahlwinkel sind es 7% Unterschied in der Leistung, bei 75° Einstrahlwinkel (kurz vor Sonnenuntergang...) hat man mit einer Serienschaltung nur noch 50% der Leistung.
Was mich etwas irritiert ist der Vergleich zum Schwebeleistung:
Bei einem Schwebeleistungsbedarf von 2.1Watt (v=6m/s und v_sink=0.42m/s) ergibt sich mit einem Propellerwirkungsgrad von 60% und Motorwirkungsrad von 70% und einer Fehlanpassung von 80% (wild geschätzt) eine notwendige Solarleistung von 5.6Watt. Das kommt mir im Vergleich zu der Verfügung stehenden Leistung sehr wenig vor. Da wäre ja noch Fliegen bis 15° Sonne über dem Horizont möglich. Der Wirkungsgrad der Zelle ist ja schon im Solarstrom berücksichtigt.
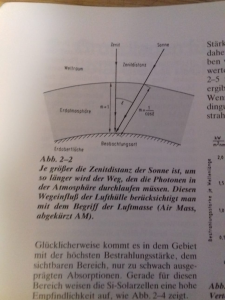
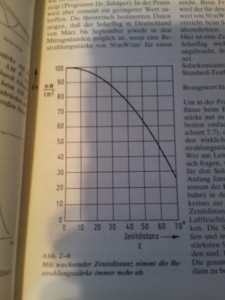
Bei 70° Zenitabstand zur Sonne hab ich nach der Bibel noch 275 von 1010Watt/m² auf einer ebenen Fläche, also 0.27 im Vergleich zu cos(70)=0.34. Das passt also auch grob (auch wenn ich gefühlt eher zweimal mit dem Cosinus der Zenitdistanz der Sonne reduzieren würde - einmal für die Lauflänge durch die Atmoshpäre und noch einmal für die Reduktion der projezierten Fläche).
Vielleicht findet jemand ja noch meinen Denkfehler.
Aber die möglichen Gewinne durch Parallelschaltung bei schwierigen Bedingungen im Vergleich zur Serienschaltung kompensieren wohl den geringeren Gesamtwirkungsgrad des Antriebstranges durch die geringere Betriebsspannung, oder muss ich da auch noch mal nachrechnen...?
Man kann ja mit den Daten der Zellen Kennlinien berechnen. Wenn man dann mit dem Solarstrom (Einstrahlung bzw. Einstrahlwinkel) spielt kann man schön sehen was sich in den Kennlinien tut und ausrechnen wie viel Leistung man in einer Parallelschaltung bzw. einer Serienschaltung herausholen kann.
Hier erst einmal die Kennlinien in Abhängigkeit vom Einstrahlwinkel bei 500W/m² (Bad Pyrmont 21.4/8. 13:00...).
Den Solarstrom habe ich hierzu aus dem Kurzschlussstrom bei 1000Watt/m² durch halbieren berechnet (er ist ja linear zur Einstrahlung) anschließend mit dem jeweiligen Cosinus der Zenitdistanz der Sonne multipliziert (bei 75° noch 34%).
Wenn man nun von einer Winkeldifferenz von 10° zwischen zwei Zellen ausgeht kann man die jeweils passenden Kennlinien berechnen und sie virtuell parallel oder in Serie zusammenschalten.
Bei der Parallelschaltung sind die Spannungen identisch (sollte so gewählt werden, dass die Gesamtleistung maximal ist - die MPP's der beiden Zellen unterscheiden sich zumindest bei halbwegs realistischen Einstrahlwinkeln aber nur sehr gering) und die Ströme addieren sich.
Bei Serienschaltung ist der Strom (fast) durch die schwächere Zelle vorgegeben und die Spannungen addieren sich.
Wenn man nun die Einstrahlwinkel variiert kann man den Unterschied in der Gesamtleistung bewerten. Hier nun die Gesamtleistung für 20Zellen:
Wie zu erwarten hat man so gut wie keinen Unterschied bei senkrechter Einstrahlung. Mit zunehmender Schrägbestrahlung steigen die Unterschiede. Bei 45° Einstrahlwinkel sind es 7% Unterschied in der Leistung, bei 75° Einstrahlwinkel (kurz vor Sonnenuntergang...) hat man mit einer Serienschaltung nur noch 50% der Leistung.
Was mich etwas irritiert ist der Vergleich zum Schwebeleistung:
Bei einem Schwebeleistungsbedarf von 2.1Watt (v=6m/s und v_sink=0.42m/s) ergibt sich mit einem Propellerwirkungsgrad von 60% und Motorwirkungsrad von 70% und einer Fehlanpassung von 80% (wild geschätzt) eine notwendige Solarleistung von 5.6Watt. Das kommt mir im Vergleich zu der Verfügung stehenden Leistung sehr wenig vor. Da wäre ja noch Fliegen bis 15° Sonne über dem Horizont möglich. Der Wirkungsgrad der Zelle ist ja schon im Solarstrom berücksichtigt.
Bei 70° Zenitabstand zur Sonne hab ich nach der Bibel noch 275 von 1010Watt/m² auf einer ebenen Fläche, also 0.27 im Vergleich zu cos(70)=0.34. Das passt also auch grob (auch wenn ich gefühlt eher zweimal mit dem Cosinus der Zenitdistanz der Sonne reduzieren würde - einmal für die Lauflänge durch die Atmoshpäre und noch einmal für die Reduktion der projezierten Fläche).
Vielleicht findet jemand ja noch meinen Denkfehler.
Aber die möglichen Gewinne durch Parallelschaltung bei schwierigen Bedingungen im Vergleich zur Serienschaltung kompensieren wohl den geringeren Gesamtwirkungsgrad des Antriebstranges durch die geringere Betriebsspannung, oder muss ich da auch noch mal nachrechnen...?
Zuletzt bearbeitet:



 :
: